current projects
explore our projects for the 2024-2025 academic year!
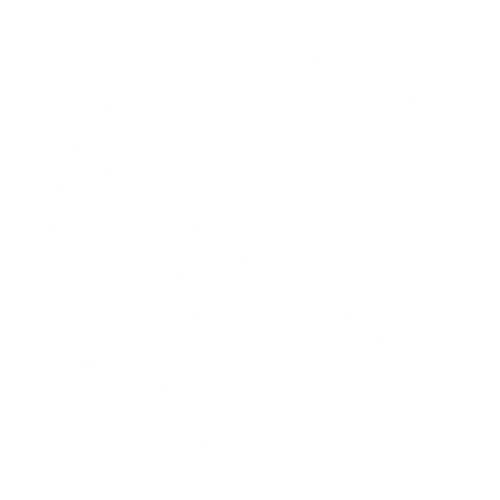
Dance Cam
choreography-tracking video camera
Dance Cam is a movement-tracking camera used to keep dancers in-frame while they record themselves performing. This project was inspired by professional dance videos, in which the movements of the dancers are matched by the camera for a more dynamic recording. Dance Cam uses a pose detection model to calculate where the dancer is with respect to the frame, using that information to coordinate rover movement. For the spring semester, Dance Cam is looking to do a mechanical revamp, add support for multiple dancers, and incorporate a speaker system.
TerraTracer
terrain-mapping drone

TerraTracer is a 3D mapping drone designed to survey and map terrains with high precision. Using LiDAR imaging technology, the drone will capture topographical data, creating contour maps of the landscape. TerraTracer also uses machine learning to classify objects on the surface and provide live feedback on basic motion metrics. For the spring semester, TerraTracer is looking to improve their drone design, develop a UI for the drone’s results, and build mars-themed terrain to test their project on.
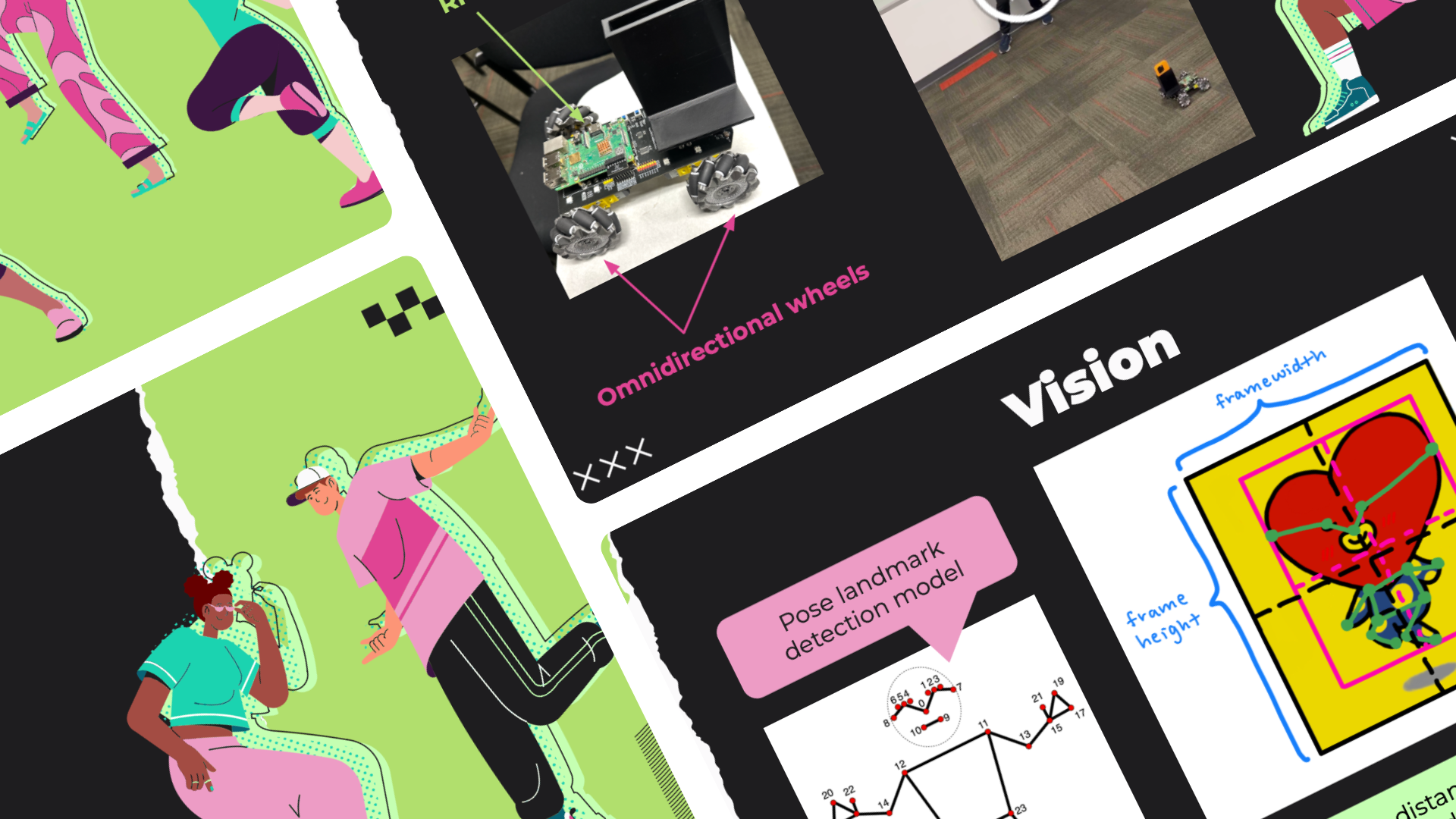
ATE-Ball
real-life GamePigeon 8-ball
ATE Ball is a project inspired by GamePigeon 8Ball, projecting trajectory lines on a full-sized pool table to project cue ball movement based on stick angle. The project consists of a 5-foot PVC pipe frame over the pool table, holding a projector and camera that detects the stick angle and projects the direction of the cue ball. For the spring semester, ATE Ball is looking to build an automatic pool stick and add collision lines for other balls on the table.
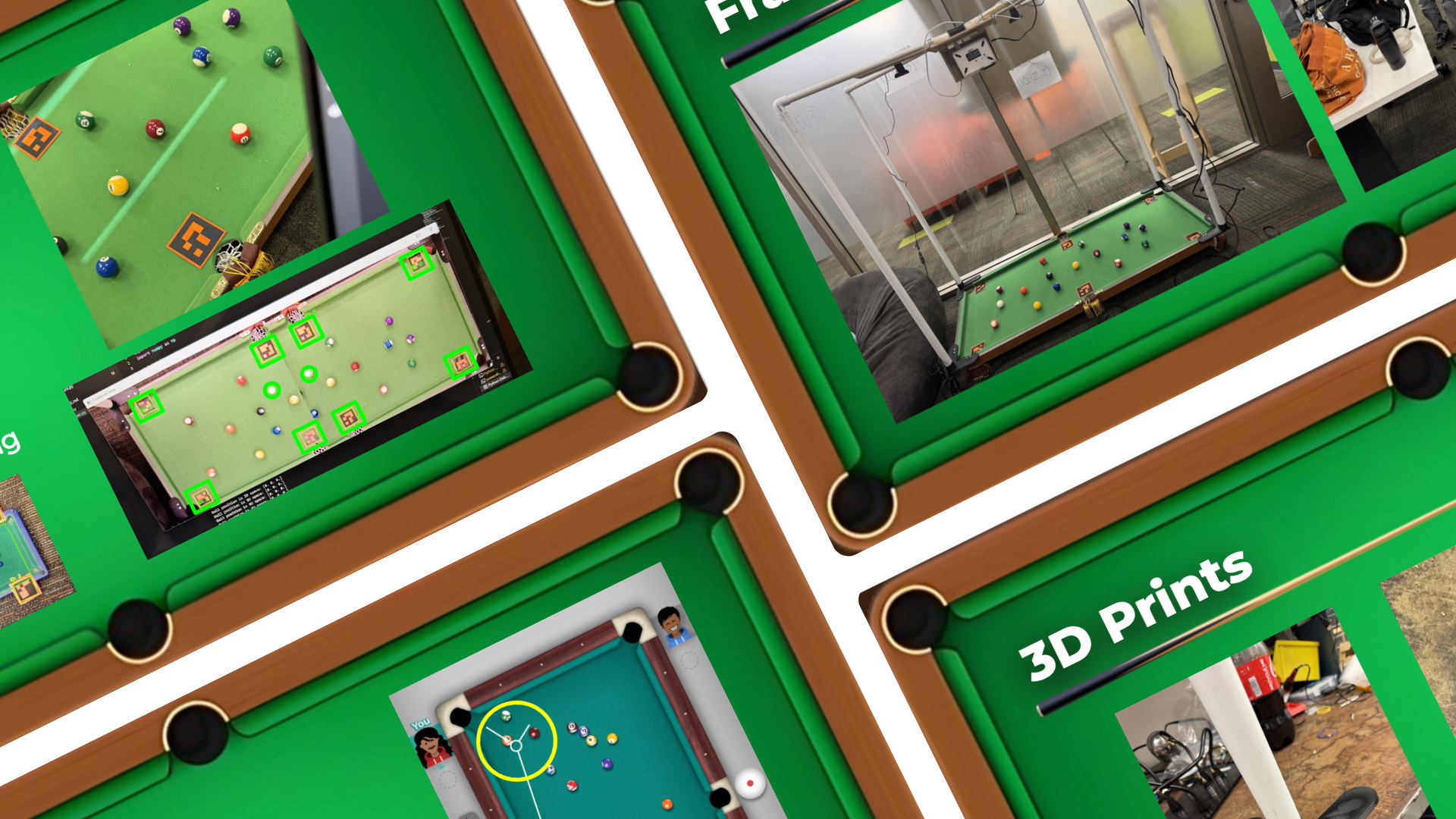
Karate Kid
wearable device for karate practice
Karate Kid (inspired by the “wax on, wax off” scene in the movie Karate Kid) is a wearable remote used to track limb motion and coordinate movement on a game screen. This project enables users to practice their karate skills through a game format. For the spring semester, Karate Kid is looking to develop a user-friendly wearable design, create wearables for multiple limbs, and add additional game skills.
Anthony
your personal remote-finding buddy
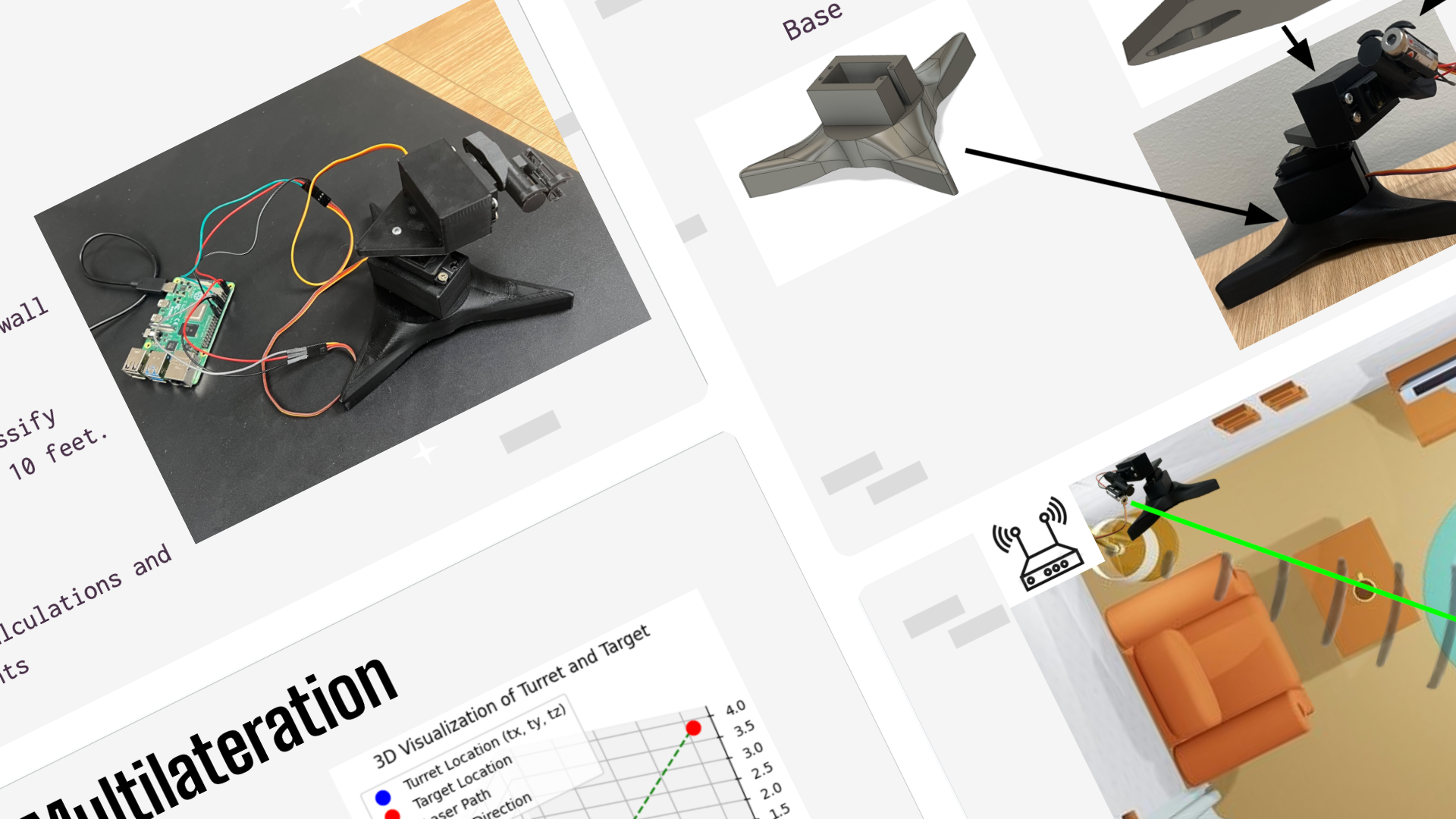
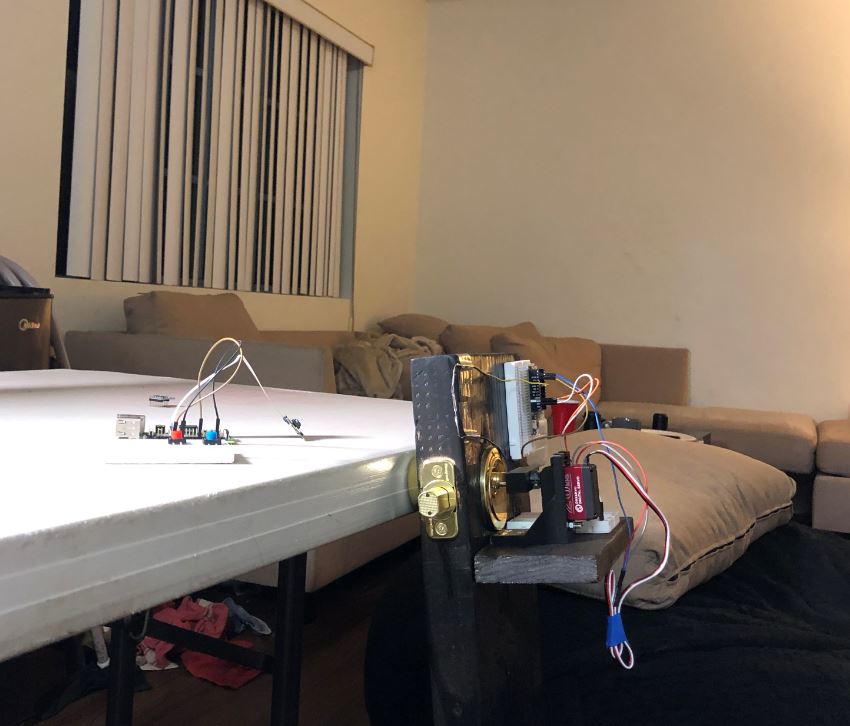
Anthony is a TV remote locating device that uses Bluetooth and Ultra-Wideband triangulation to locate lost TV remotes. This project consists of an Anthony Laser Buddy with a full range of motion and a laser able to point at known locations in a room. For the spring semester, Anthony is looking to add a wall-mounting feature, obtain a clear enough signal to accurately classify distance to the remote, and improve accuracy of servo motor based on angle calculations.
Bulls-AI
your new robotic darts opponent

Bulls-AI is a robotic darts opponent that can project a dartboard on any wall, throw sticky darts, and track/display the current score. This project consists of a base and a rotating arm, attached to a claw for holding and releasing a dart. For the spring semester, Bulls-AI is looking to implement spring-loaded release, optimize release timing, and integrate computer vision for gameplay.
Kaleido-Kickz
customizable shoe-painting machine
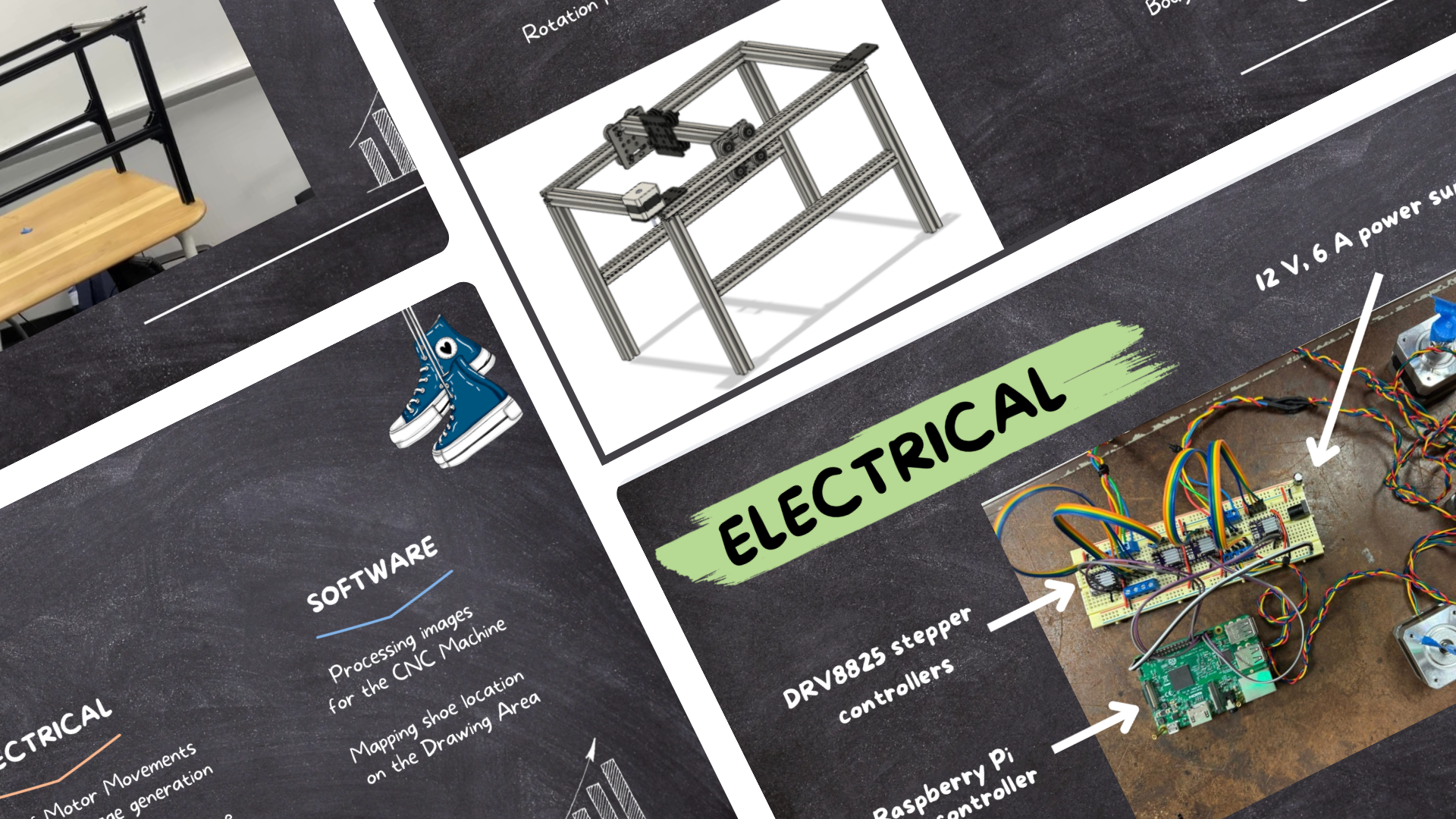
Kaleido-Kickz is a CNC drawing machine used to customize Converse sneakers. The project contains a front-end for drawing a design, which is converted into G-code for controlling motor movement and moving the marker across the side of the shoe. For the spring semester, Kaleido-Kickz is looking to refine Y- and Z-axis movement, create a shoe and pen holder, and implement limit switches for calibration.
Power Path
energy-generating sidewalk panel

Power Path is a sidewalk panel that generates/captures energy through walking. This project uses Faraday’s Law to turn mechanical input into a change in magnetic flux into energy that can be stored. Power Path uses a hand-press model to mimic a step, along with a vertical magnet and solenoid for voltage induction. For the spring semester, Power Path is looking to refine the project’s interior to maximize power generation and develop a UI to track analytics for the panel.
BCD
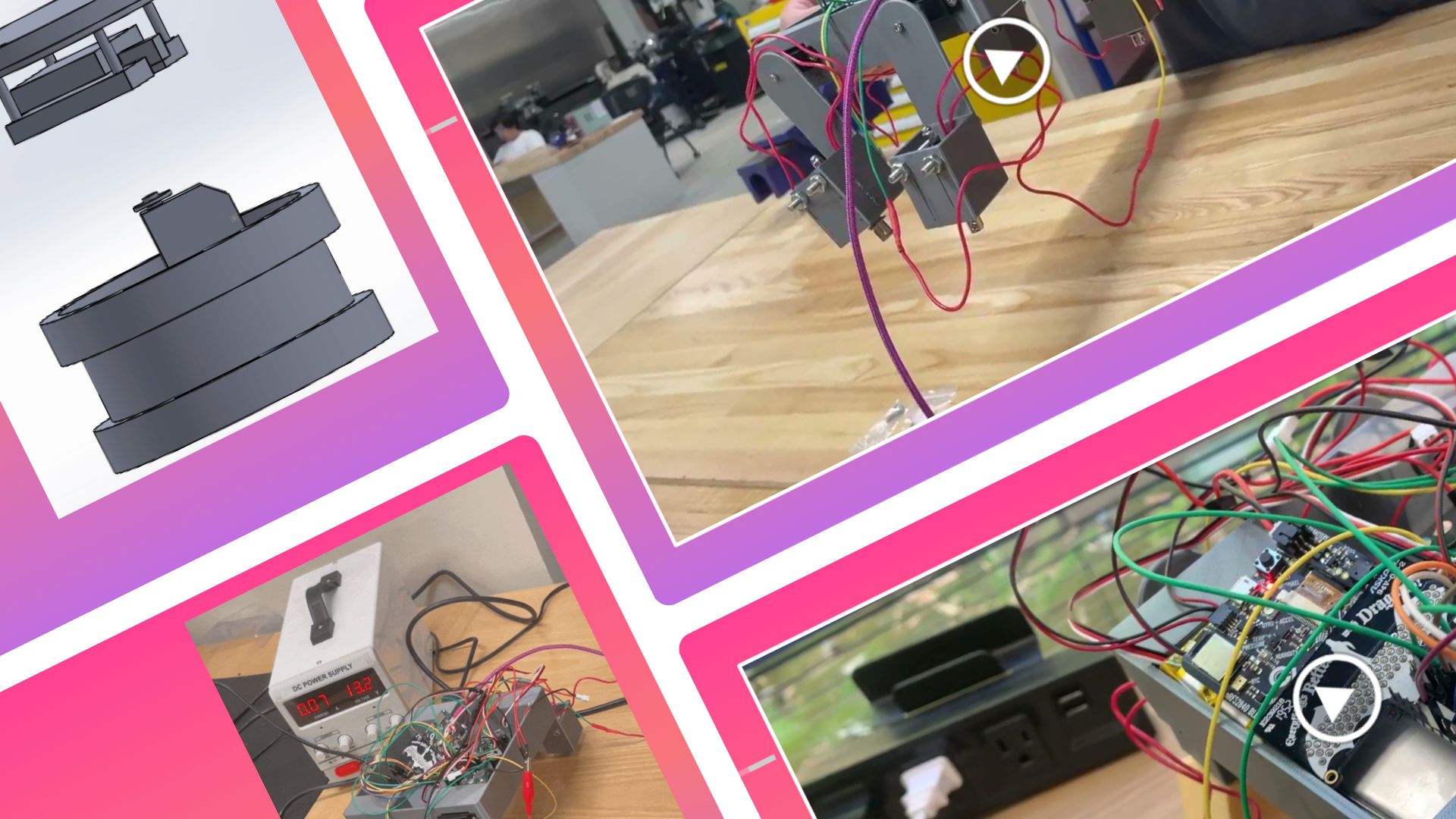
brain-controlled drone
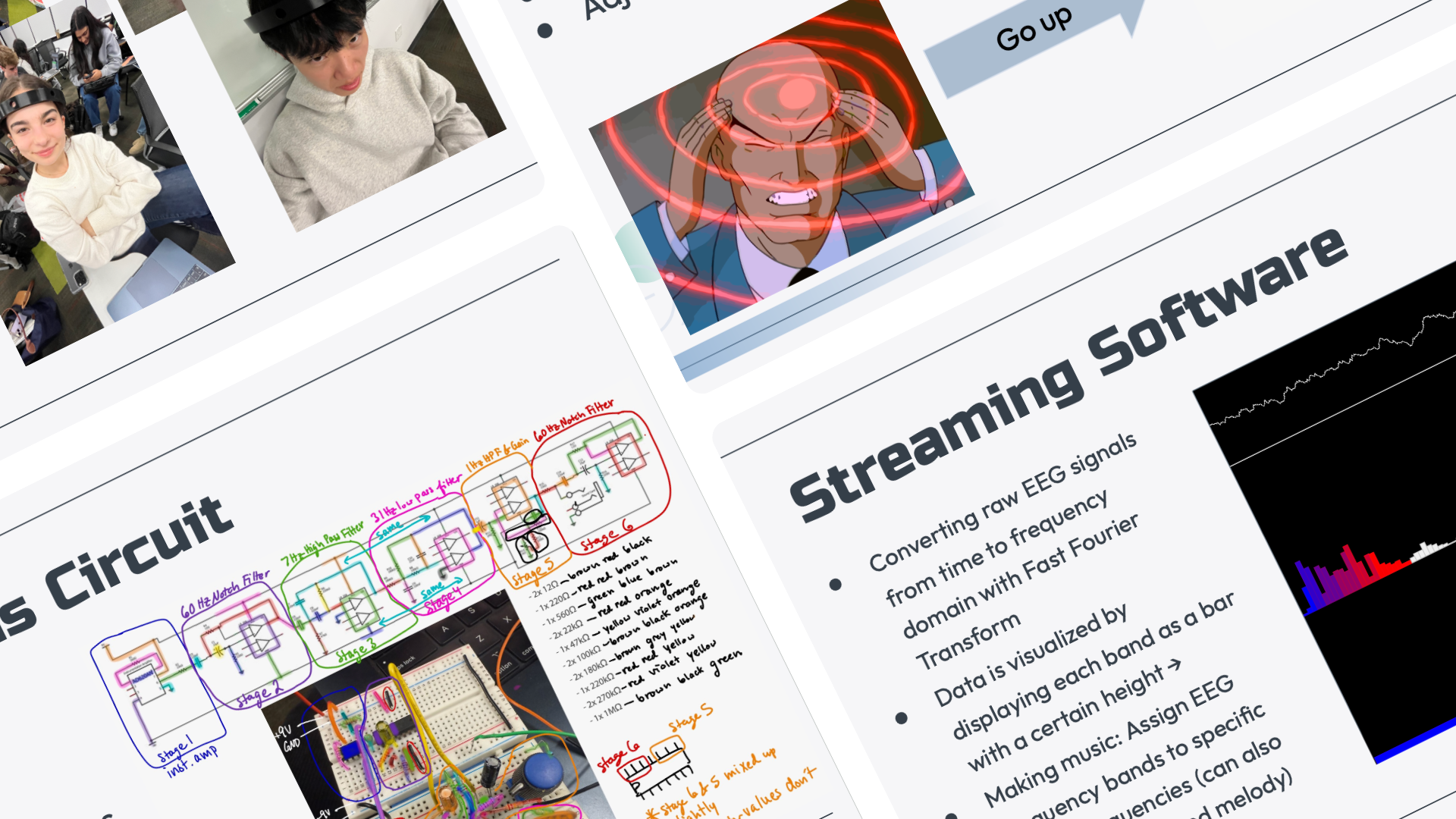
BCD (Brain-Controlled Drone) is a wearable headset that uses EEG to control a small drone. This project uses advanced circuitry to read and refine electric signals collected from silver-chloride electrodes. These electric signals are converted to the frequency domain, which are currently being used to create music as a proof of concept. For the spring semester, BCD is looking to classify and map signals motor controls, make their wearable more adjustable, and improve the robustness and quality of their sensors.
The Toppest Hat
mechanical self-growing top hat
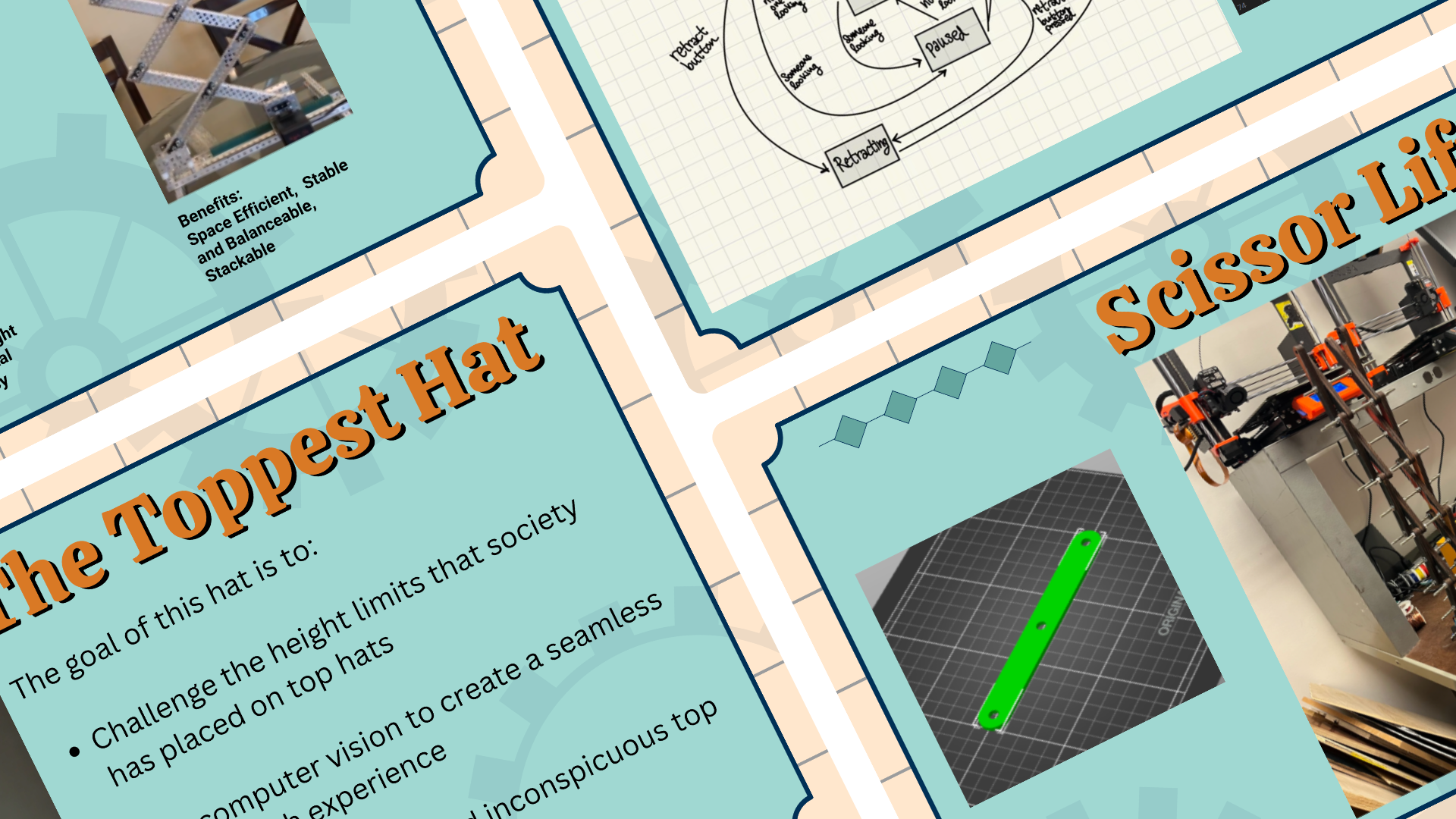
The Toppest Hat is a top hat with a mechanical insert, allowing it to grow taller only when no one is looking at it. The interior of the hat contains a scissor lift and motor, which is extended when the discreetly placed camera detects no faces. For the spring semester, Toppest Hat is looking to improve motor torque, implement faster computer vision, and make the hat look like a normal, inconspicuous top hat.
Magic Mirror
interactive fashion mirror

Magic Mirror is a smart fashion mirror that allows you to try on clothes without actually trying them on! This project maps clothes using pose estimation and allows you to cycle through different pants and shirts through gesture recognition. It also has an app component that allows uploading, storage, and organizing of various garments and outfits. For the spring semester, Magic Mirror is looking to improve their wardrobe app, permanently assemble the mirror in its frame, and experiment with 3D mapping logic.
2023-2024 projects
AI-sthetic
interactive Van Gogh-inspired art installation

AI-sthetic is an interactive art installation that can be applied to any surface to add art onto any space! This project essentially captures a photo extracts items with CV, alters them with diffusion models, and projects it back onto the space. The mechanical design consists of 3-foot tall space-themed wooden podium for carrying the projector and computer for the project. AI-sthetic is perfect for creating an immersive experience in any space.
Bartholomew Banksworth
robotic Monopoly opponent

Bartholomew Banksworth is an robotic monopoly board and opponent, controlling piece movement and making AI-driven game decisions. A terminal-based front end is used to set up the game, collect game inputs, and keep track of game state. With that, pieces are moved across a circular monopoly board using a rotating arm and electromagnets. With this project, you’ll never have to find a buddy to play monopoly with again! Bartholomew has always got you!
BioBotanic
smart plant care system
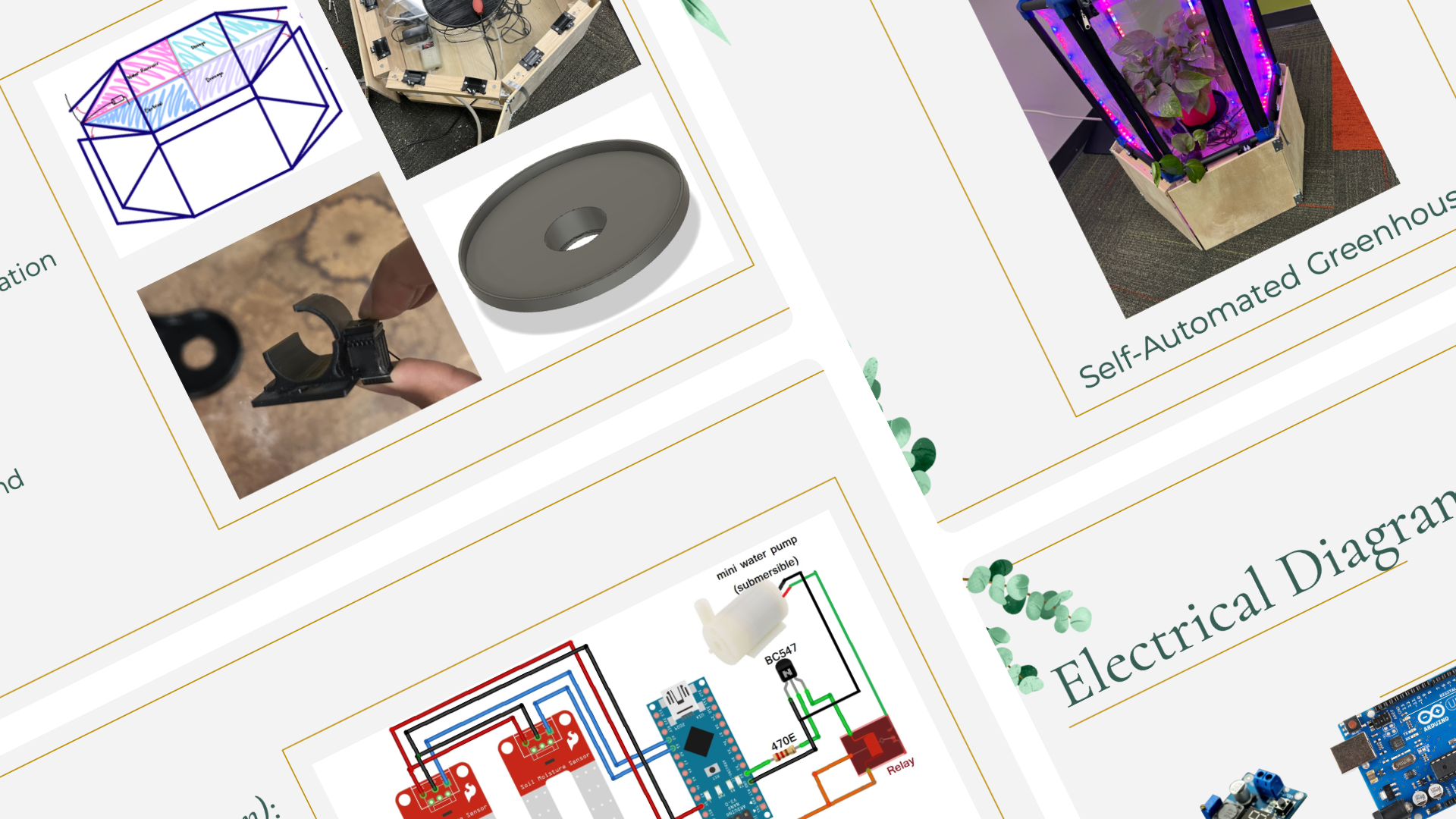
BioBotanic is a self-automated greenhouse with a hexagonal frame, polyethylene film for insulation, LED growing lights, an irrigation/drainage system, and a camera for observation! This project adjusts brightness based on the plant’s needs through its web interface, and automatically supplies water based on the soil’s dryness. This project also features support for 30 plant types, automation support and time-series logging for the environment, and user notes and plant logs! With BioBotanic, you will never have to worry about killing a plant again.
Doodle Drone
spray-painting drone

Doodle Drone is a 3D printed drone containing a spray painting system attached to the bottom. Doodle Drone was entirely student-designed -- no drone kit used! -- to fit the constraints of the spray painting system. With this project, the user can control and fly the drone as normal, with the option to spray paint mid-flight. This allows the user to create art on a canvas with their drone as they fly it around!
MagnoVibe
Ferrofluid music speaker
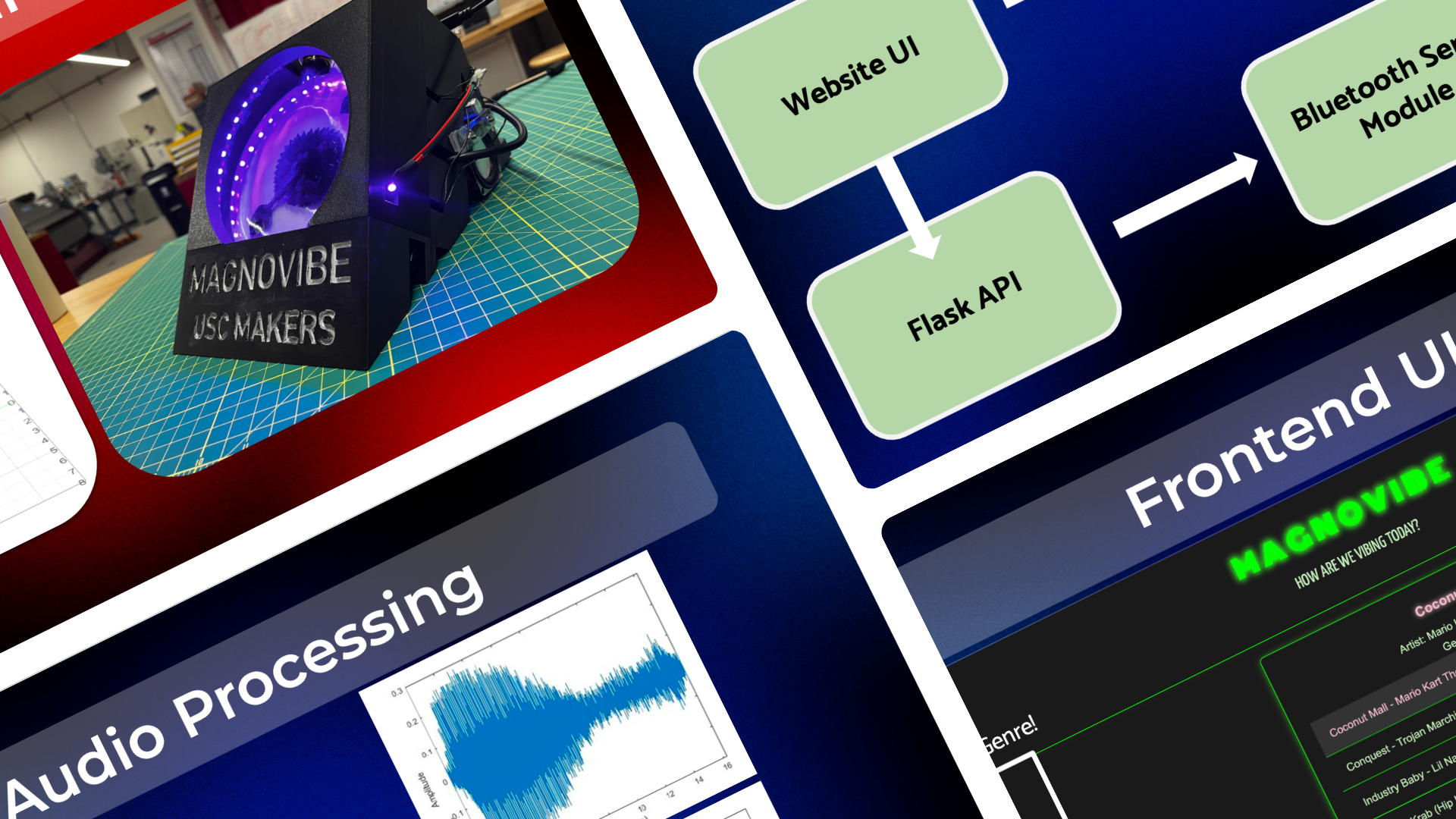
MagnoVibe is a ferrofluid music speaker that turns music into a visually immersive experience as ferrofluid dances on the display. This project uses audio signal processing to extract volume, tempo, and percussive highs and lows. This data is then mapped to electromagnetic current, sent to five separate electromagnets behind the display to push and pull the ferrofluid in different directions. The result? A fun, mesmerizing music speaker that vibes with you!
Baby Robokeeper
robotic foosball goalie

Baby Robokeeper is a robotic foosball goalie that blocks any shot you take. This project contains a mini foosball table with a camera mounted over the center of the table to track ball movement. Using computer vision, the direction and speed of the ball is tracked and its path is predicted. Using a belt-drive gantry, the goalie rod is driven left or right to position the goalie to block the ball.
Sol'y Clean Solar
self-cleaning solar panel
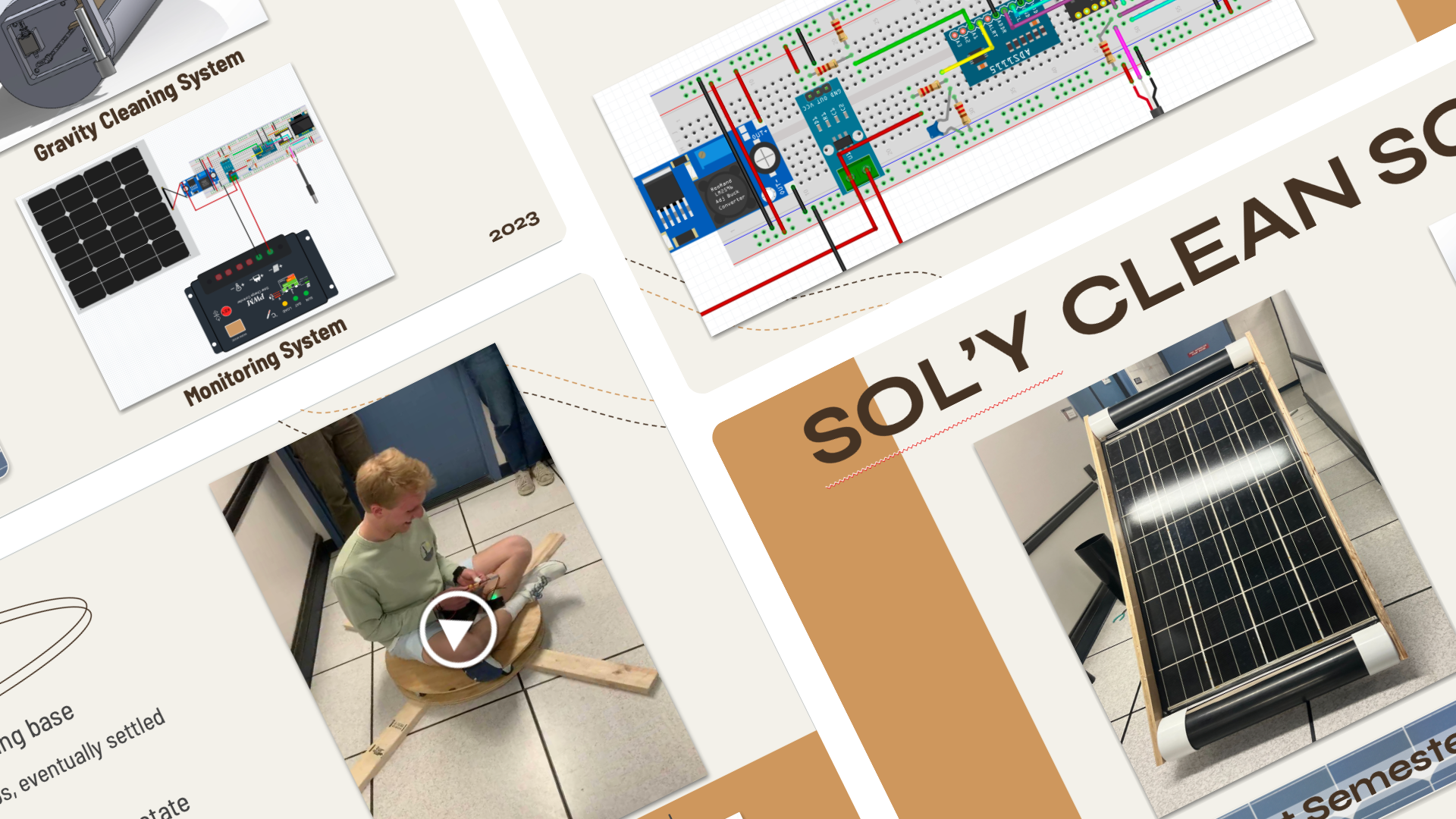
Sol’y Clean Solar is a solar panel with automated cleaning and angle optimization. The cleaning mechanism of this project uses a rotating microfiber cloth brush for hot/dry environments to clear off and dust and debris on the panel. For angle optimization, this project uses a linear actuator to control the panel’s incline, and a BLDC actuator for rotating the panel. This project also features a front-end to track cleanings, energy stored, and direction.
The Smartender
robotic bartender
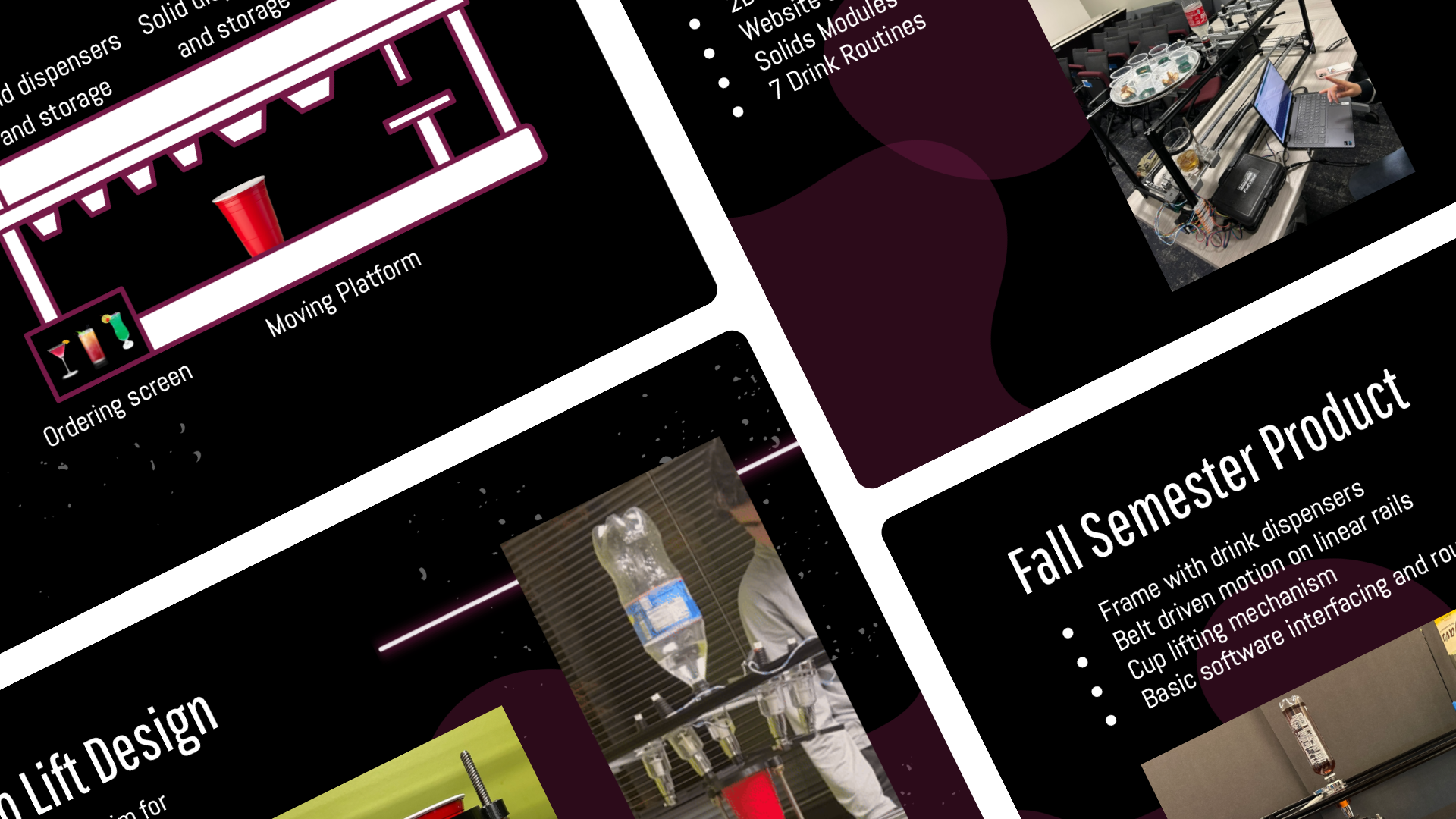
The SmarTender is a robotic bartender that combines simple, high reliability symptoms with a versatile, flashy implementation. The frame is made from 2020 aluminum extrusions, allowing flexibility of drink dispensers and linear rails. A motor driven belt system moves the cup along the frame, and drinks are dispensed into the cup via a lifting mechanism, pushing on a nozzle attached to the drink and allowing controlled release. The final product contained 2D motion, a website with Bluetooth connection for placing drink orders, a solids module, and 7 drink routines.
Tony Stark's Big Blasting Bonanza
Iron Man-inspired gauntlet

Tony Stark’s Big Blasting Bonanza is an Iron Man-inspired gauntlet for interactive gameplay. The glove base contains a cavity on the palm for an RGB. LED and speaker, a wrist plate, and 3D printed red casing so you can truly feel like Iron Man! It features an IMU, which detects gauntlet angle and acceleration, and a motion camera that track’s arm movement for in-game cursor movement. Both of these enable the player to shoot repulsors in-game, taking out obstacles and opponents that stand in your way.
Train Tango
virtual reality Subway Surfers game
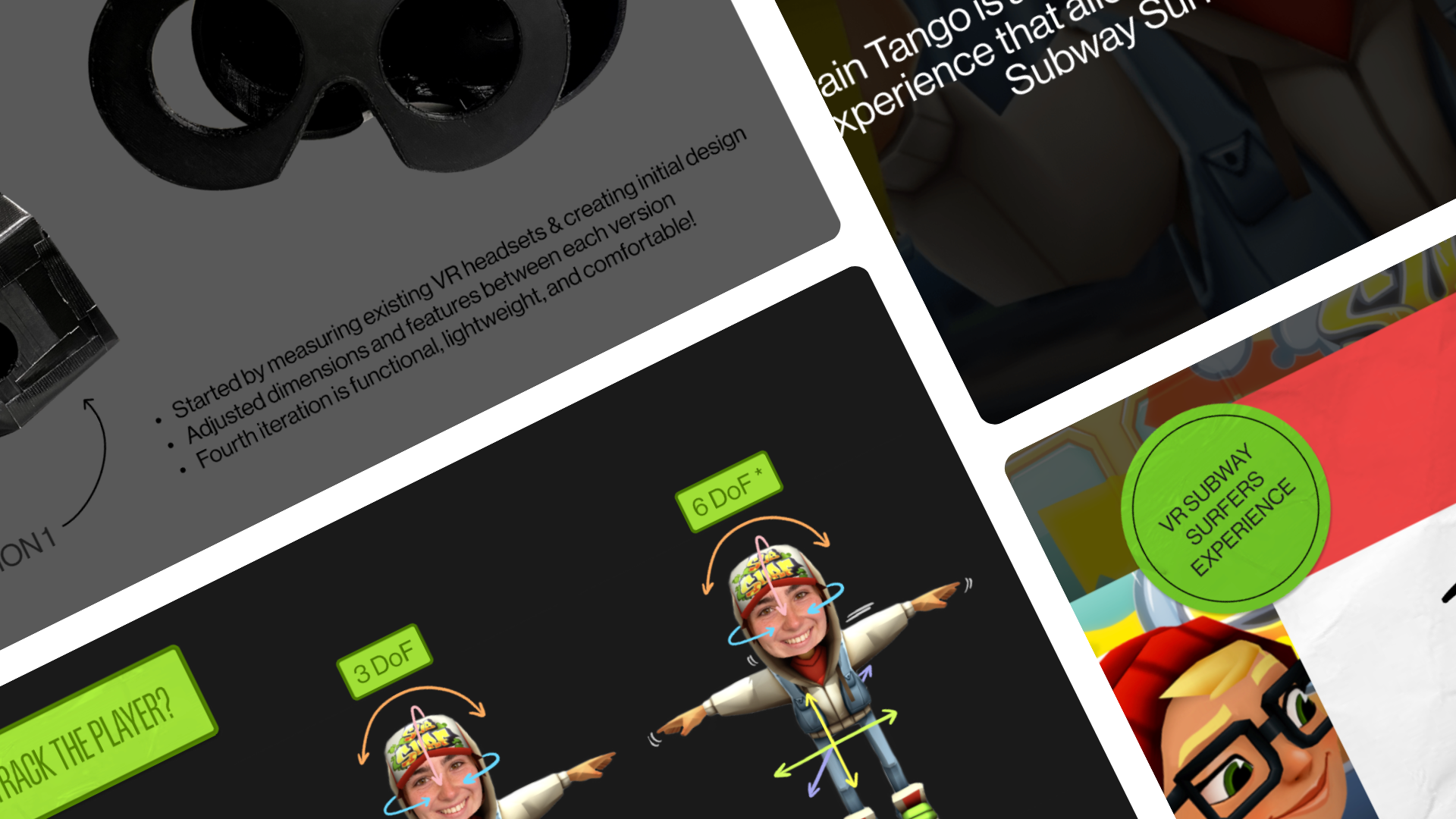
Train Tango is an immersive infinite runner gameplay experience that allows users to have a virtual reality Subway Surfers experience. A VR headset gives you the full-view experience of being inside Subway Surfers, and an IMU worn on the chest tracks acceleration and gyroscope to approximate motion, controlling your movement inside the runner game.
2022-2023 projects
Waterbender
interactive water art installation
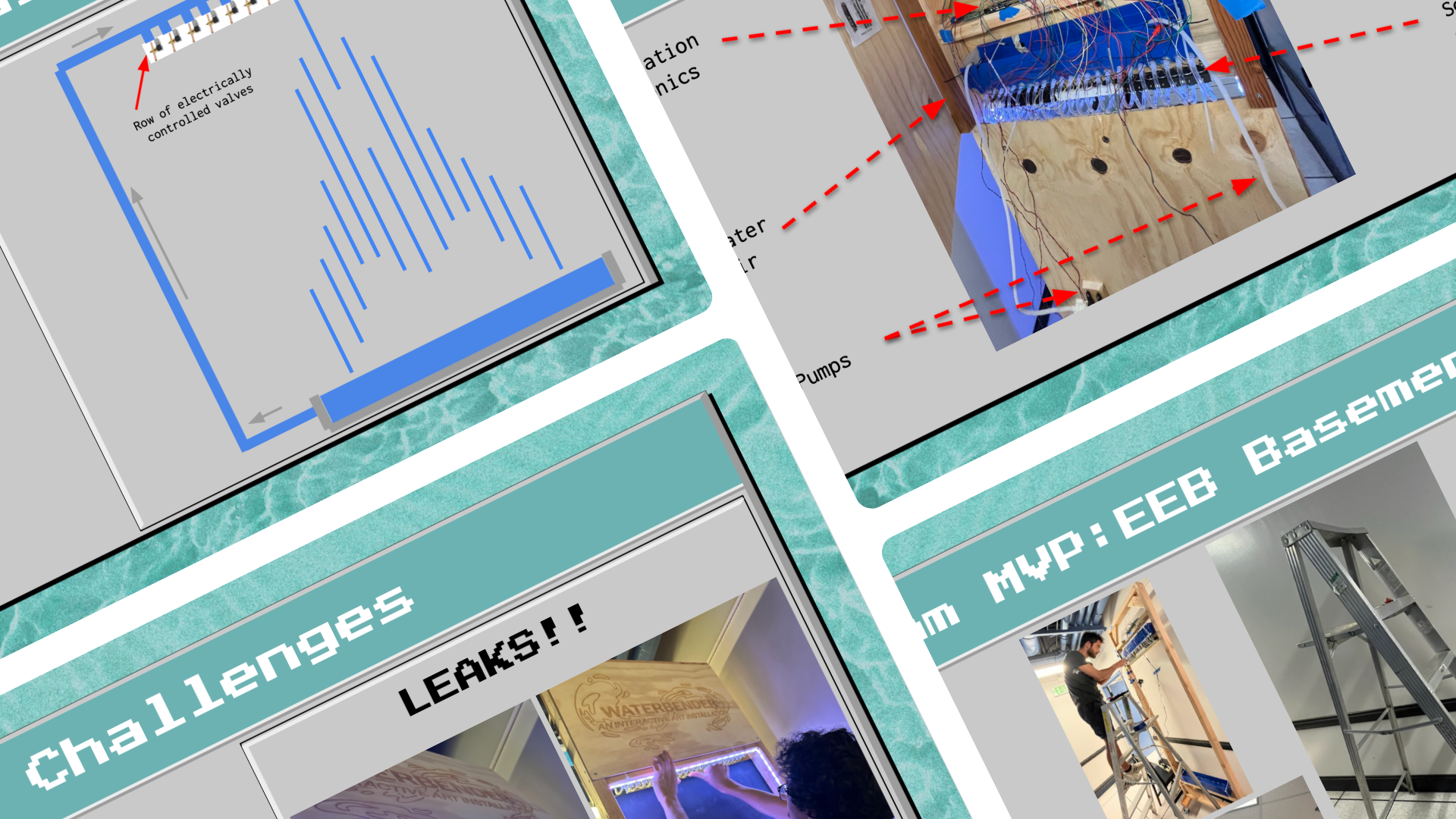
Waterbender's goal is to create an interactive art installation that will be deployed on campus upon completion. The project allows users to interact with the project in different ways, i.e. drawing their own 2D rasterized designs, and then see them displayed by streams of water. This project was inspired by an advertisement that used droplets of water to create 3D animations frame by frame, that were later stitched together to form a video. While visually impressive, the advertisement required significant production work to create the animation -- Waterbender makes the art piece more interactive so that users can see their design live.
Pipeline
independent dual-extruder 3D printer
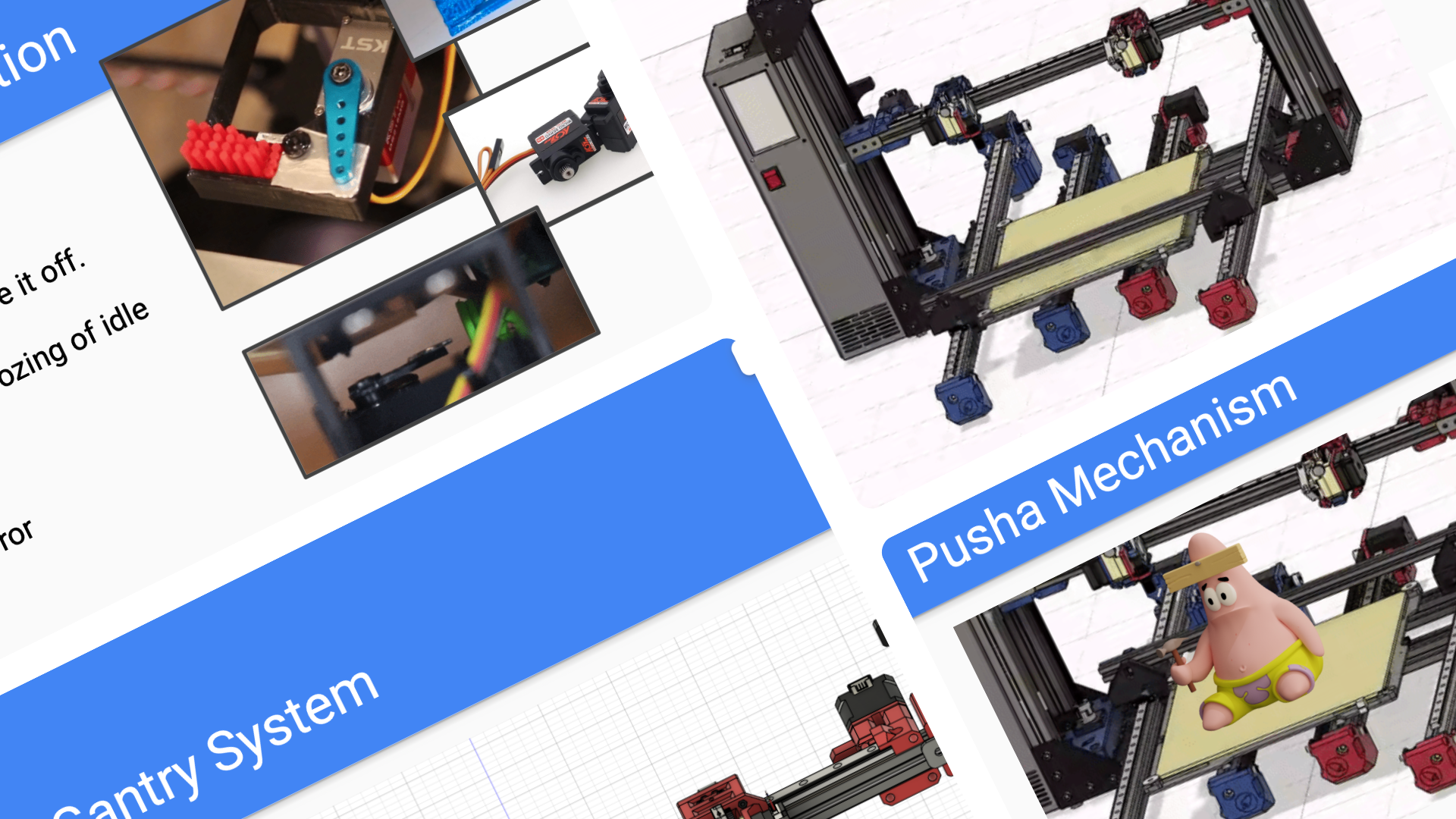
The goal of this project was to design and build an IDEX (Independent-Dual-Extrusion) 3D printer with dual-color printing capability, and an experimental automated part removal mechanism as we named it Pusha. We are scrapping parts from a Luizbot TAZ Pro 3D printer and retaining the general chassis design. We designed many components in-house while also remixing from open-source 3D printer projects. We have three subteams working on the IDEX capability, the pusha gantrysystem, and the slack integration and computer vision aspect.
Le Chord
Suzuki Omnhichord-inspired musical instrument
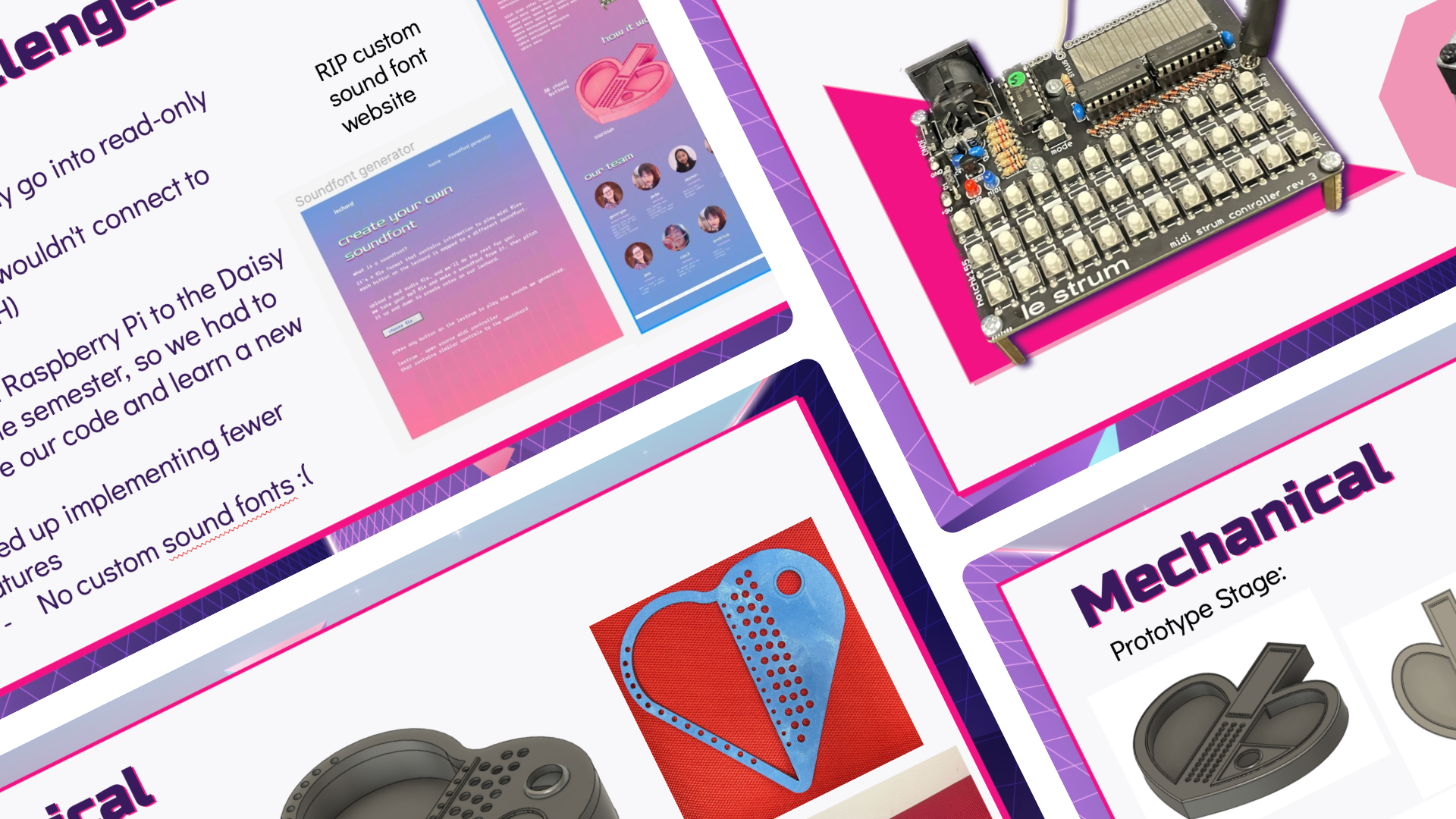
The goal of this project was to make our own version of the Suzuki Omnichord. We used the 'Le Strum' DIY midi controller as the base of our instrument and then used open-source software on a raspberry pi to output sound. For finishing touches, we are building an enclosure and putting together circuitry to form a cohesive instrument. We also designed a web interface to sample sounds to make custom sound fonts to be used on the instrument.
Zooming Kitties
autonomous cat stroller
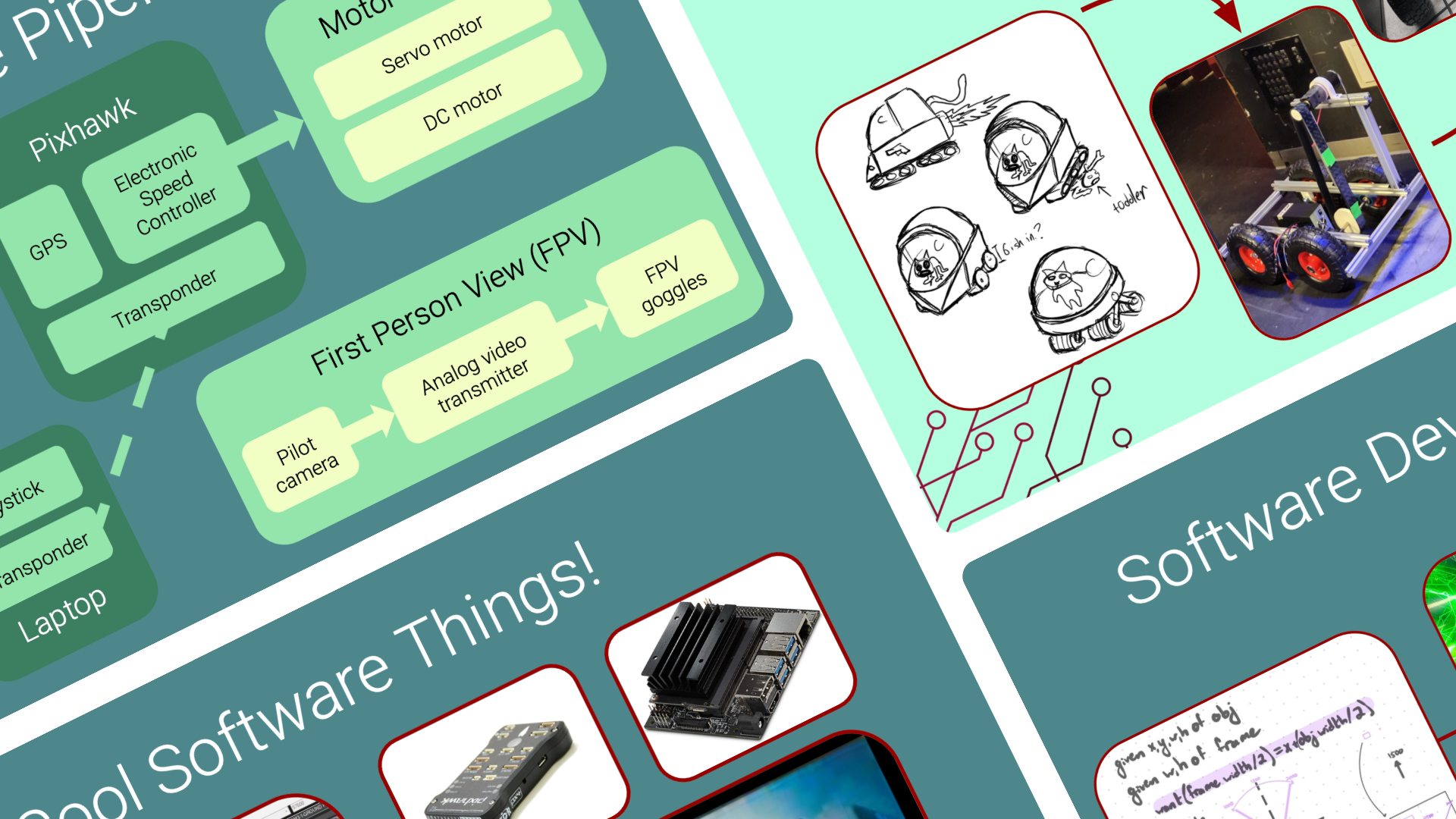
Zooming Kitties is an autonomous rover designed to carry a cat like a motorized cat stroller. The rover can be operated through a remote control such as an Xbox controller or navigate on its own to destinations using its GPS and IMU sensors. Operators can see a first person view of what is in front of the rover by wearing FPV goggles, allowing for beyond line of sight operation. The rover is also equipped with computer vision capabilities, allowing it to track and follow subjects on its own.
Starry Starry Bot
autonomous constellation spotter

Starry Starry Bot uses an astronomy laser pointer to point out stars in the night sky. The data processing pipeline of the project allows the robot's user to both pick stars to point out in the sky and identify unknown stars. Group stargazing events would be perfect times to bring along Starry Starry Bot as a stargazing assistant robot. The robot is portable and easily interfaced with through a graphical user interface, such that someone can bring the robot along to a stargazing site in order to better understand the sky above them.
Paper AirPlayin'
lightweight motorized paper airplane

Paper Airplayin's goal was to create a lightweight flight module that motorizes paper airplanes. This module is designed to fit onto most shapes and sizes of paper airplanes, and it offers the user relibale control over three degrees of motion. The inspiration for this project came from a desire to transform this popular childhood pastime into one that can be thoroughly enjoyed by everyone and enthrall even the older audiences.
RamseyBot
robotic Gordon Ramsey-inspired taste-tester
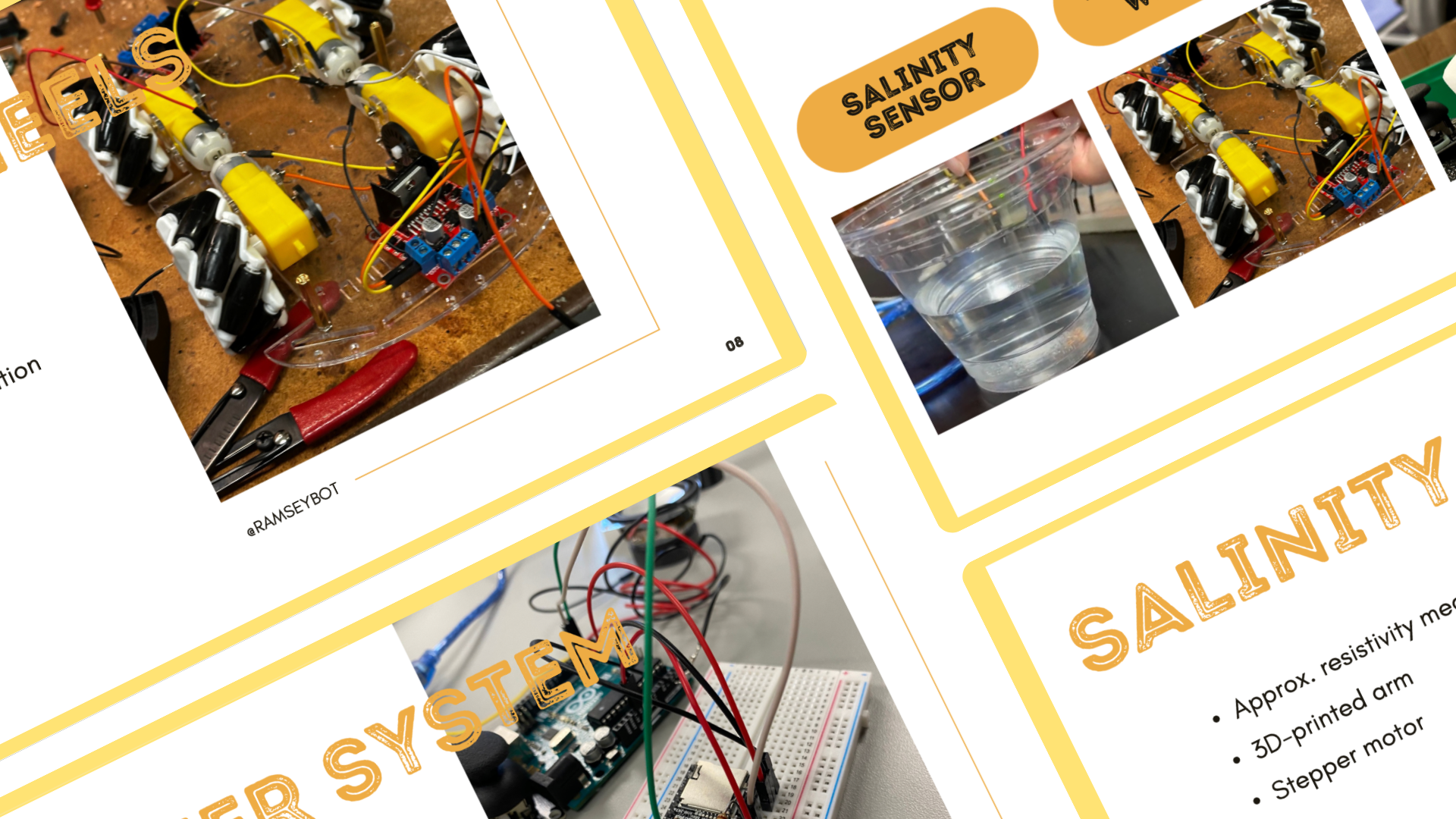
The main goal of RamseyBot was to create a fun, interactive robot that imitates Gordon Ramsay, and 'tastes' food by electrical resistivity. It can be controlled by a remote controller, with joysticks for control of movement. There will be buttons on the controller to engage in fun features like speaking lines Gordon Ramsay has said, or moving his mechanically made arm.
Electrobike
pedalless modded electric bike
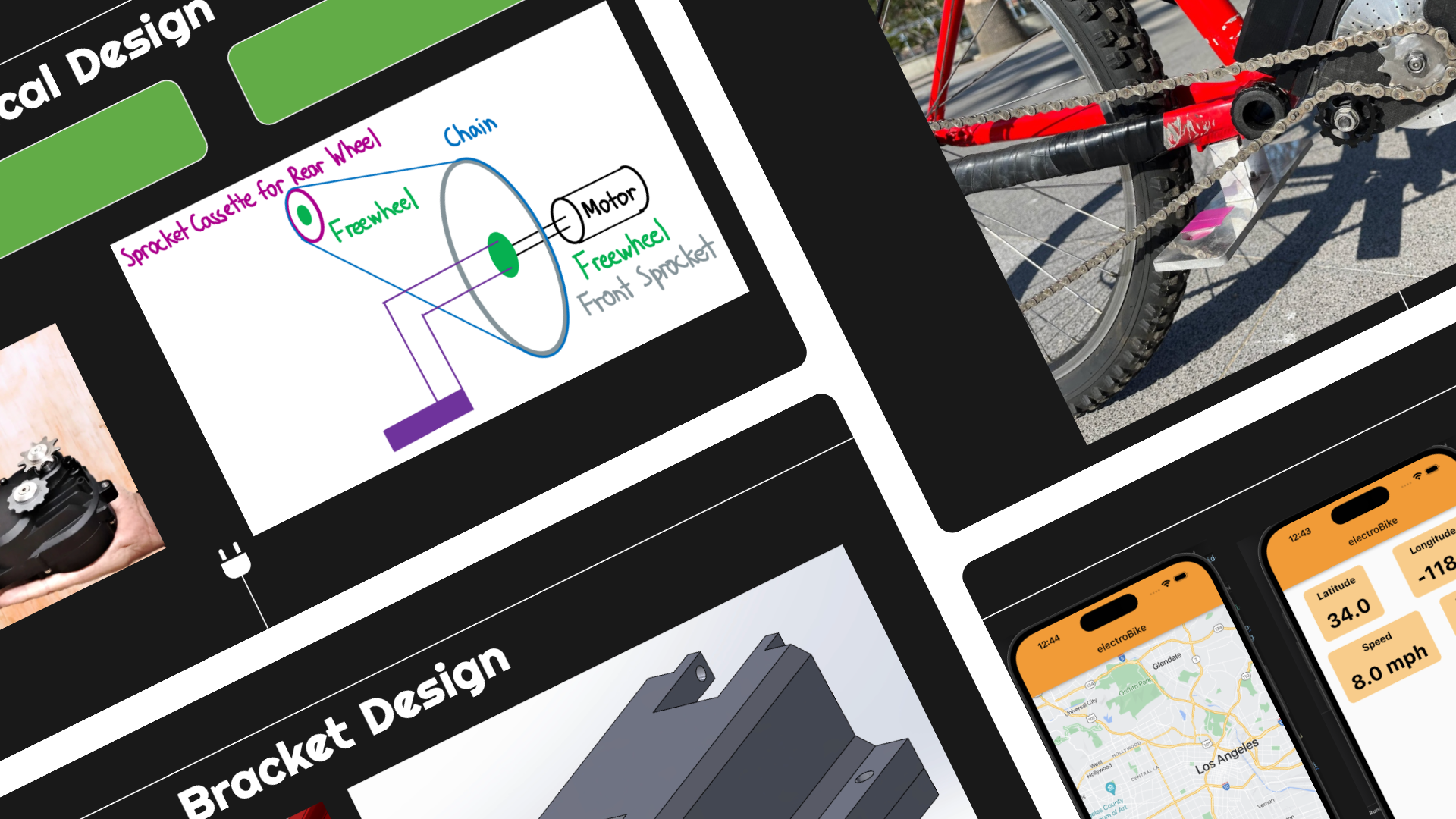
Electrobike is about converting a regular mountain bike into a super powerful electric bike. It doesn't have any pedals, because who needs those when you have 2kW of motor power? The bike uses a Raspberry Pi to interface with sensors and a custom phone app dashboard.
Kokomo
song-identifying speaker on wheels
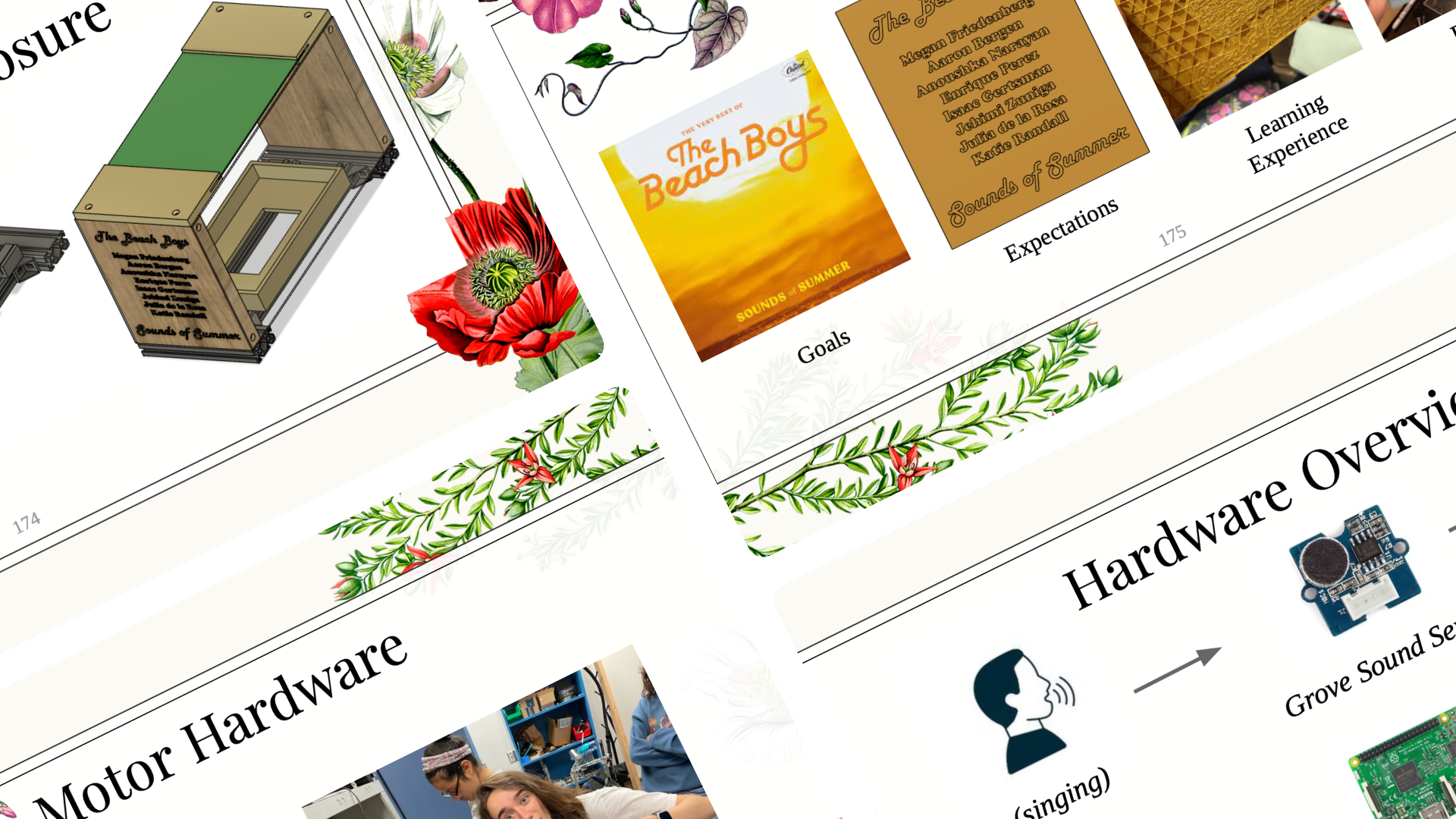
This project is based off of Space Force Season I Episode I, an episode I know we all remember where Steve Carell's character storms out of the UN meeting, and in desperation starts singing Kokomo. Once he is several verses into signing, Kokomo the song begins playing, and grows over time into a full-blown musical. Kokomo aka PartyBot, a physical robot, has the same objective. From a person singing, Kokomo will identify words, look up lyrics from those words, start playing the song being sung, and drive over to the singer.
Talaria
energy-capturing shoe insole

The goal of Talaria was to harness the kinetic energy from walking to charge a battery located within a shoe, and then use the power in this battery to charge a cellular device. Piezoelectric crystal discs were used to harness the kinetic energy while walking from the compression and decompression that occurs within the sole of a shoe for every step. This product, which focuses on power electronics and wearable devices, enables the user to charge their phone on the go, which would be extremely beneficial when in remote locations without access to a phone charger.
QB-7
Star Wars-inspired cubic drone
This project aimed to build a Star Wars-themed droid in the shame of a cube. Similar to how the BB-8 droid is a spherical droid that rolls around with a head on top, QB-7 is a cubic droid that can 'walk' on its own by flopping onto its side in the direction it intends to go.
2021-2022 projects
Compost-O-Matic
IOT-based compost monitoring system
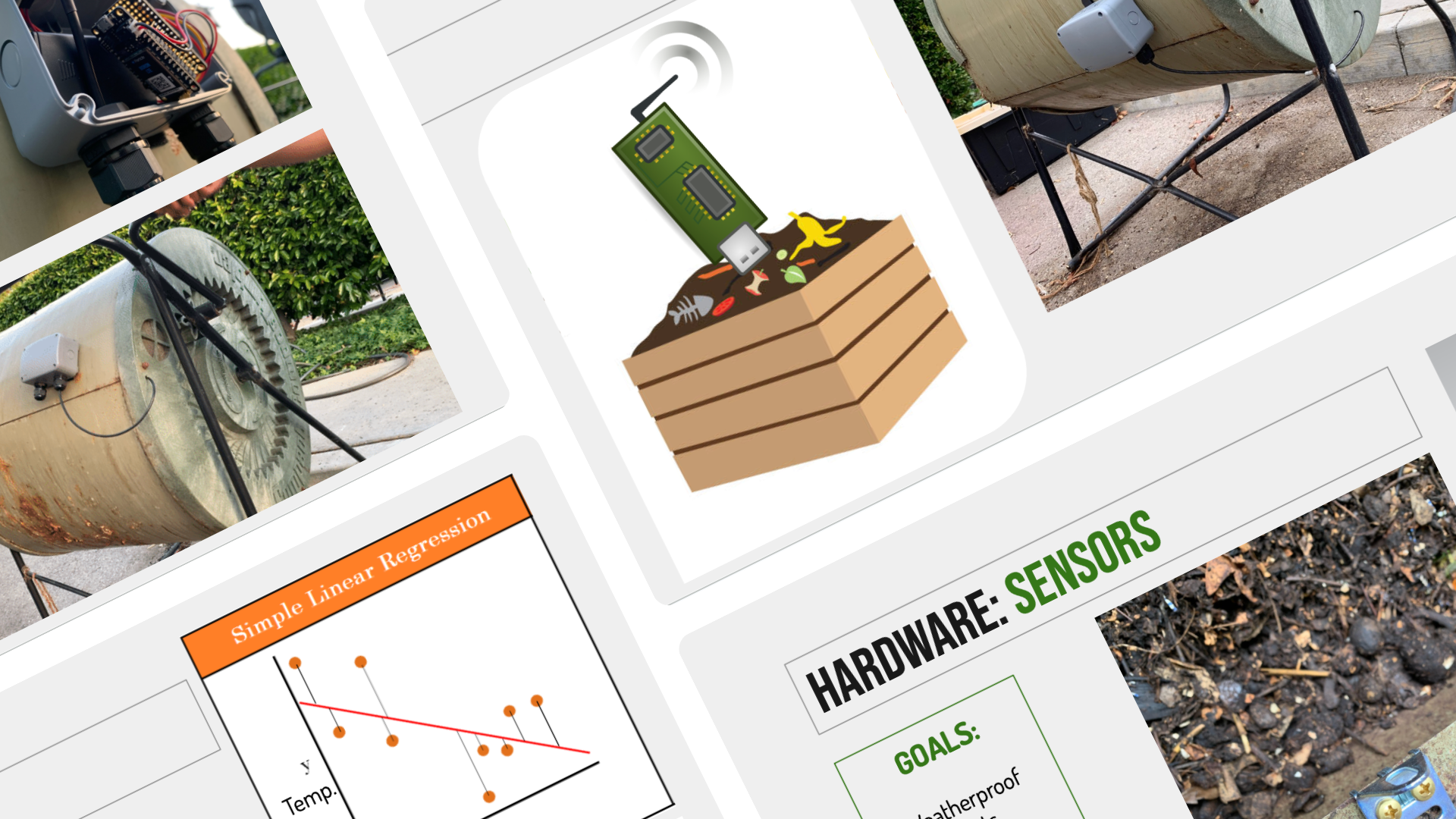
Composting is a method of recycling food scraps, yard trimmings, and plant waste into nutrient rich soil through controlled decomposition. This has the benefit of diverting trash from landfills, sequestering methane, and building soil health. However, composting waste requires very specific temperature and moisture conditions. Compost-O-Matic is an Internet-connected compost monitoring system that uses smart sensing and analytics to take the guesswork out of maintaining a compost pile. The system takes automated temperature and moisture readings from a compost bin and shares them with the user by a web interface to help inform management of the compost pile.
Crani-Arm
sEMG-controlled robotic hand
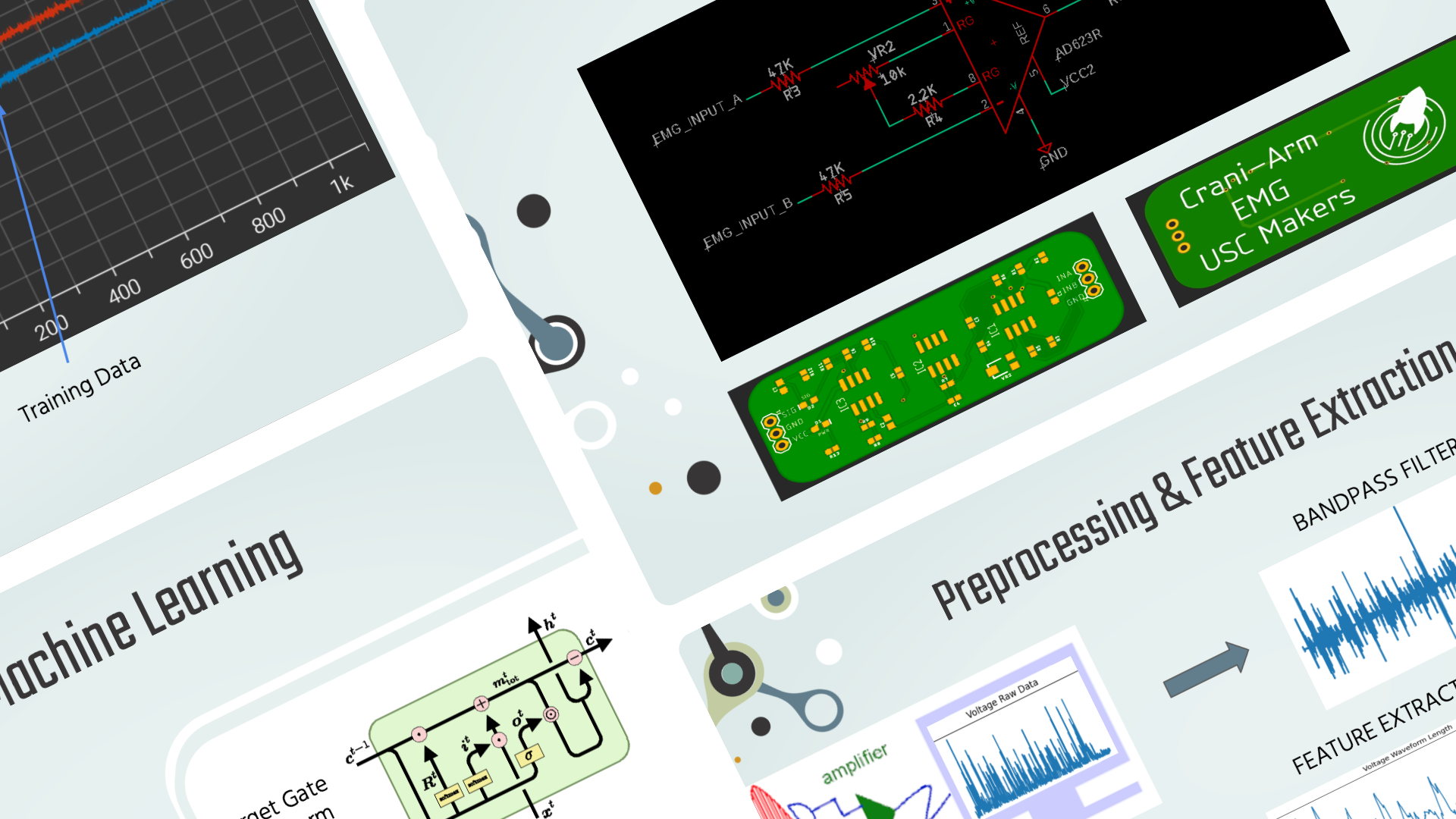
This project is inspired by the interdisciplinary fields of biology and engineering by harnessing the electrical impulses of the body to control a robotic arm. The signals are captured using several Surface Electromyography (sEMG) sensors that are placed on the forearm to capture the action potentials that occur when a user contracts their arm. Through the use of machine learning, our project interprets the data from the sEMG sensors into recognizable gestures that can be modeled using a robotic hand controlled by servo motors.
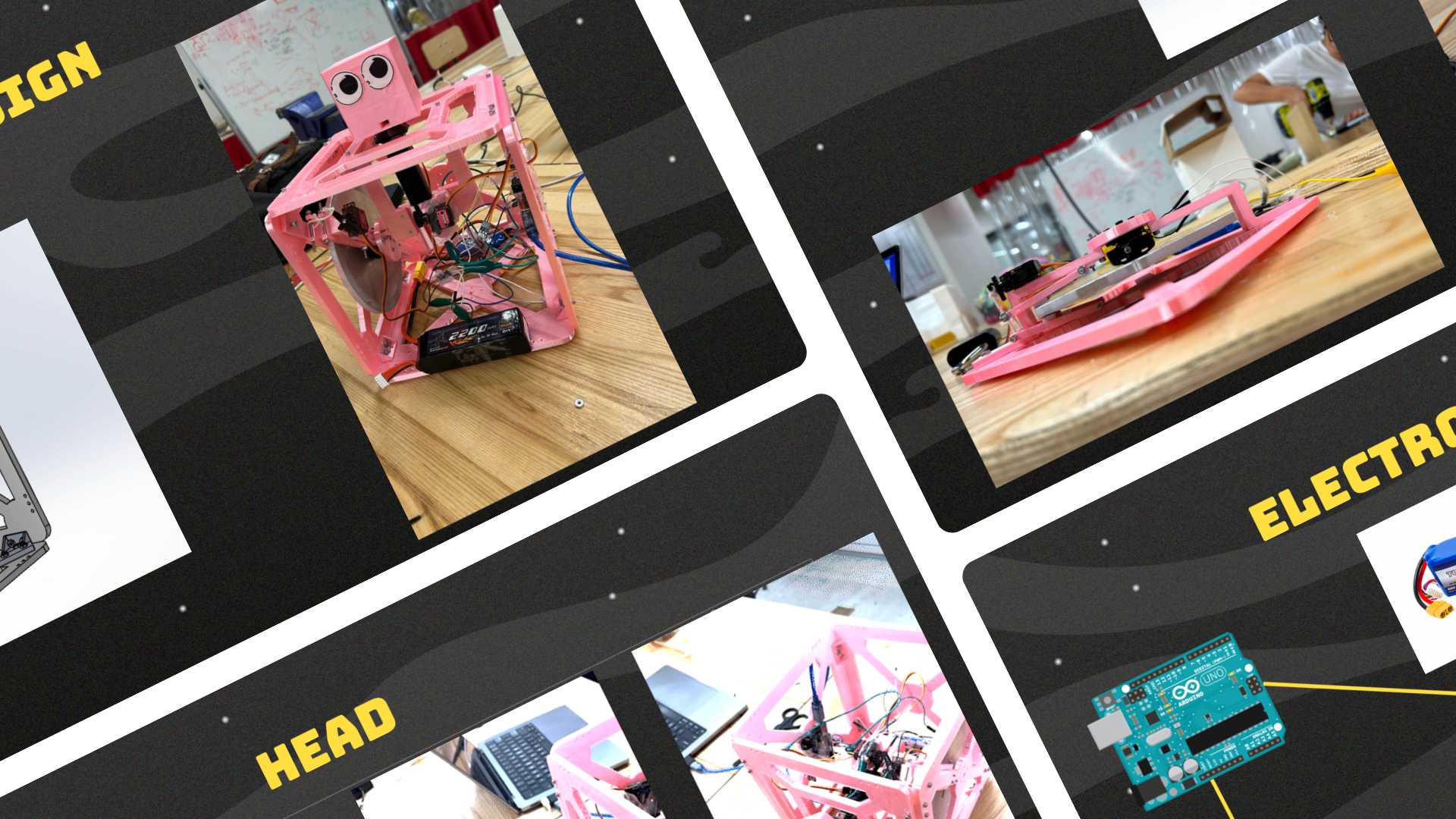
It's Coming Home
penalty kick robot
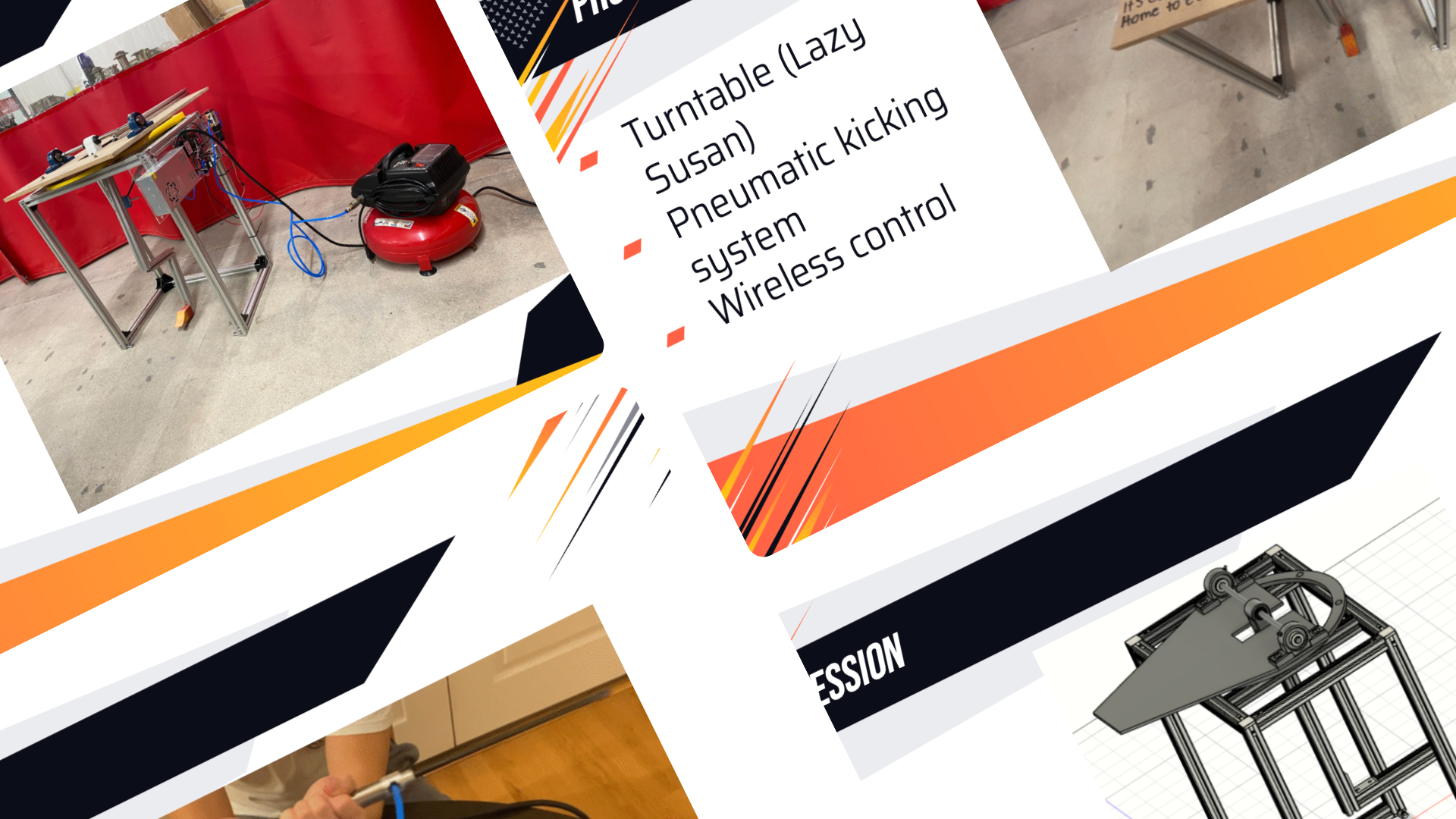
It’s Coming Home is a robot that can swing a leg and kick a soccer ball into a desired location in the goal from the penalty spot. The robot has a camera on it which takes a picture of the goal, and through some user interface, the user will be able to select the location at which the robot will shoot. Then, the robot will make the necessary mechanical adjustments, and will shoot the ball.
Kooka
cooking assistant robotic arm

Kooka is a cooking assistant robot arm. Currently, it is able to move a ladle in a stirring motion, which is useful for unclumping pasta while it is cooking. Potential future goals include enabling chopping fruits and vegetables as well as assembling ingredients.
Mag Lynx
3D-printed quadruped robot
Mag Lynx is a 3D printed quadruped robot that uses solenoids and ball joints to walk while avoiding obstacles and staying upright. Rather than using advanced software, our goal was to make the robot capable of walking by utilizing the mechanical properties of our components. The solenoids lift the bottom of the robot’s legs up rather than rotating them, allowing it to avoid low obstacles on the ground. The ball joints are attached to the feet to prevent the robot from tipping when off balanced. The robot can be controlled from a phone app through a Bluetooth connection and allows a user to move it forwards and backwards.
Reverse Choreography
choreography-based Spotify playlist generator

Inspired by STEEZY Studios’ “Reverse Choreography” series, this project captures user movement/dance and generates a Spotify playlist that fits the energy of the movement. The user first moves in front of a capture camera to a selected tempo. After analyzing movement data and prompting the user about general feeling, the playlist is automatically generated and queued on Spotify. During the process, visual effects also react off of movement and song audio once the playlist is generated.
Robot Rock
robotic drumset player

Robot Rock is an automated drumming robot. Robot Rock can lay down a predefined beat or improvise one with a snare, tom, kick drum, cymbal, and maracas. For visual flare, a llama-corn mascot sits atop the drum throne and shakes its head while LED strips flare to the beat.
Stacks on Stacks
custom pancake design printer
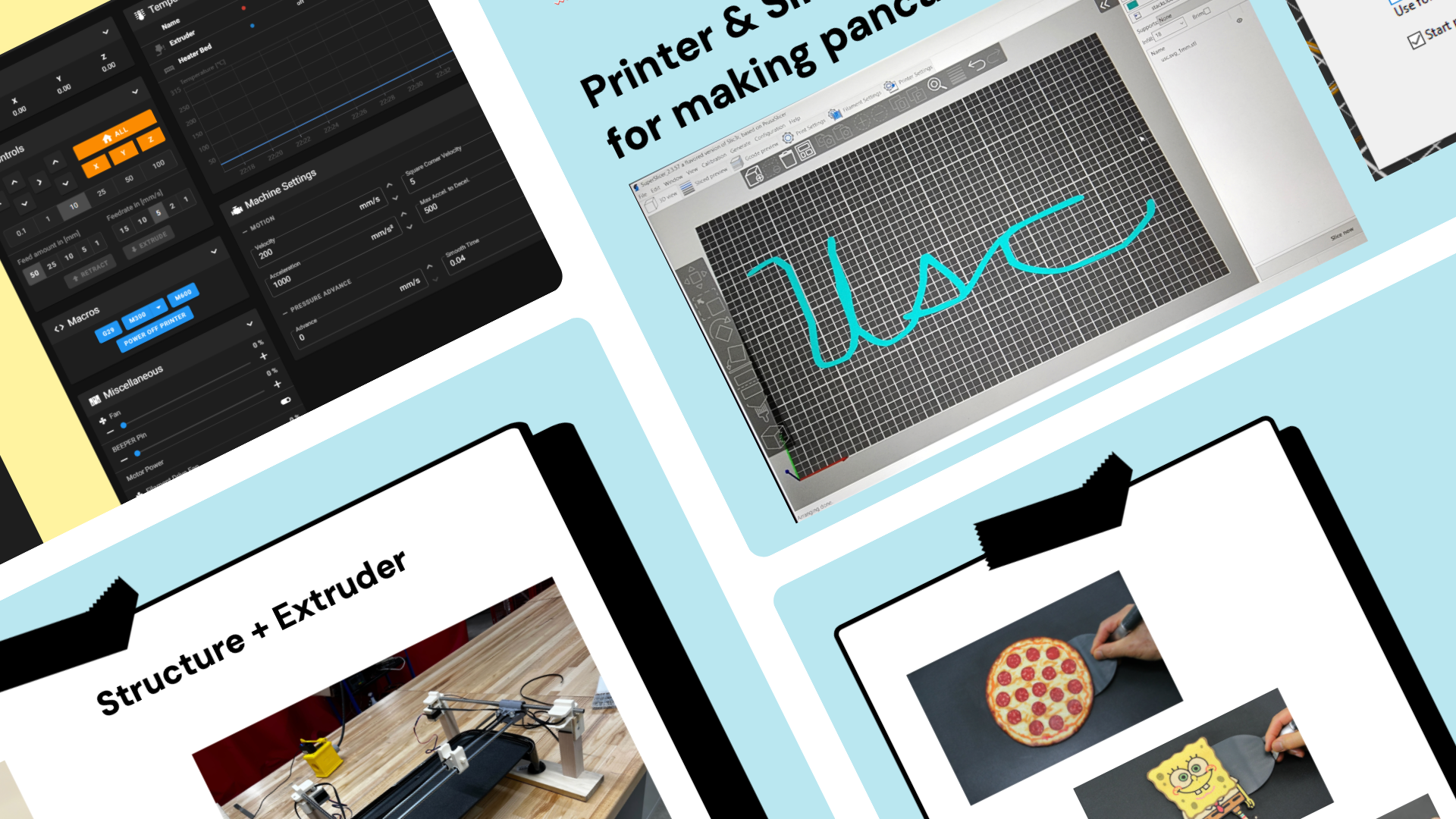
Stacks on Stacks is a robot capable of printing custom pancake designs. Users can simply upload an SVG of an image or a hand-drawn design to our web interface, and watch the robot make a precise pancake to your desired shape.
HNC
selective noise cancelling headphones

Hyperactive Noise Canceling (HNC) headphones is our own version of Active Noise Canceling (ANC) headphones. In general, ANC headphones use microphones to analyze and digitally process noise outside the headphones, then play anti-noise to cancel out the background noise. At the most basic level, this involves figuring out the frequencies, amplitudes, and phases of the background noise. Our HNC technology can be implemented on any pair of headphones and will be able to selectively cancel out sine waves of different frequencies.
Safeboard
skateboard safety module
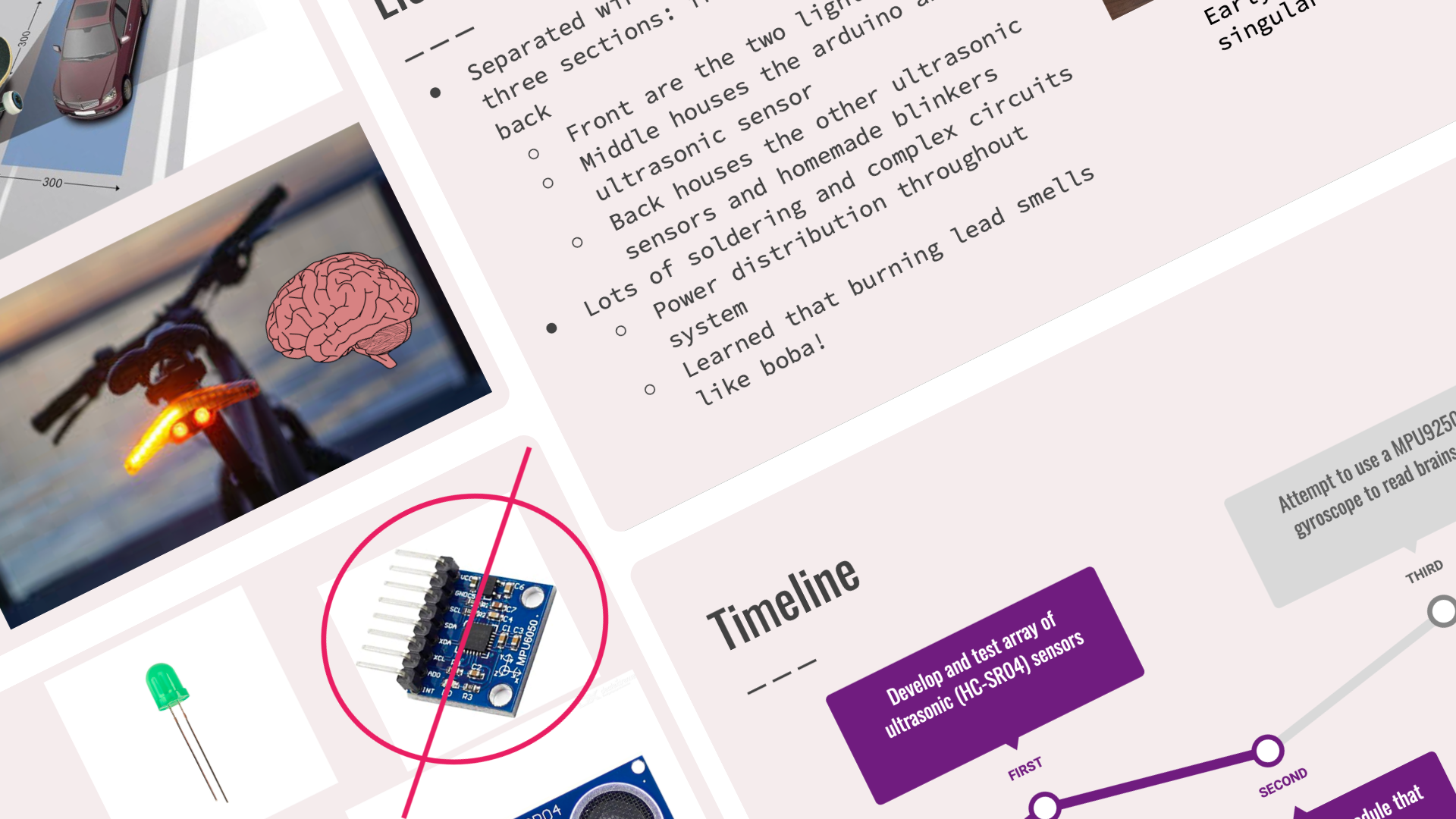
Our main goal this semester was to build a detachable skateboard safety module that amplifies not only the user’s spatial awareness, but also alerts others of the user’s movements and actions. Here at USC, skateboarding is very popular among students, with people riding throughout campus and on the streets of South Central LA. Almost everyone here knows of students that have gotten into skateboarding accidents, which can be very dangerous. Our system increases the safety of skateboarding by adding rear/blind spot detection and automatic turning blinkers to not only alert the user of their surroundings, but also alert cars and pedestrians surrounding them.
Chord Hero
Guitar Hero-inspired chord playing software
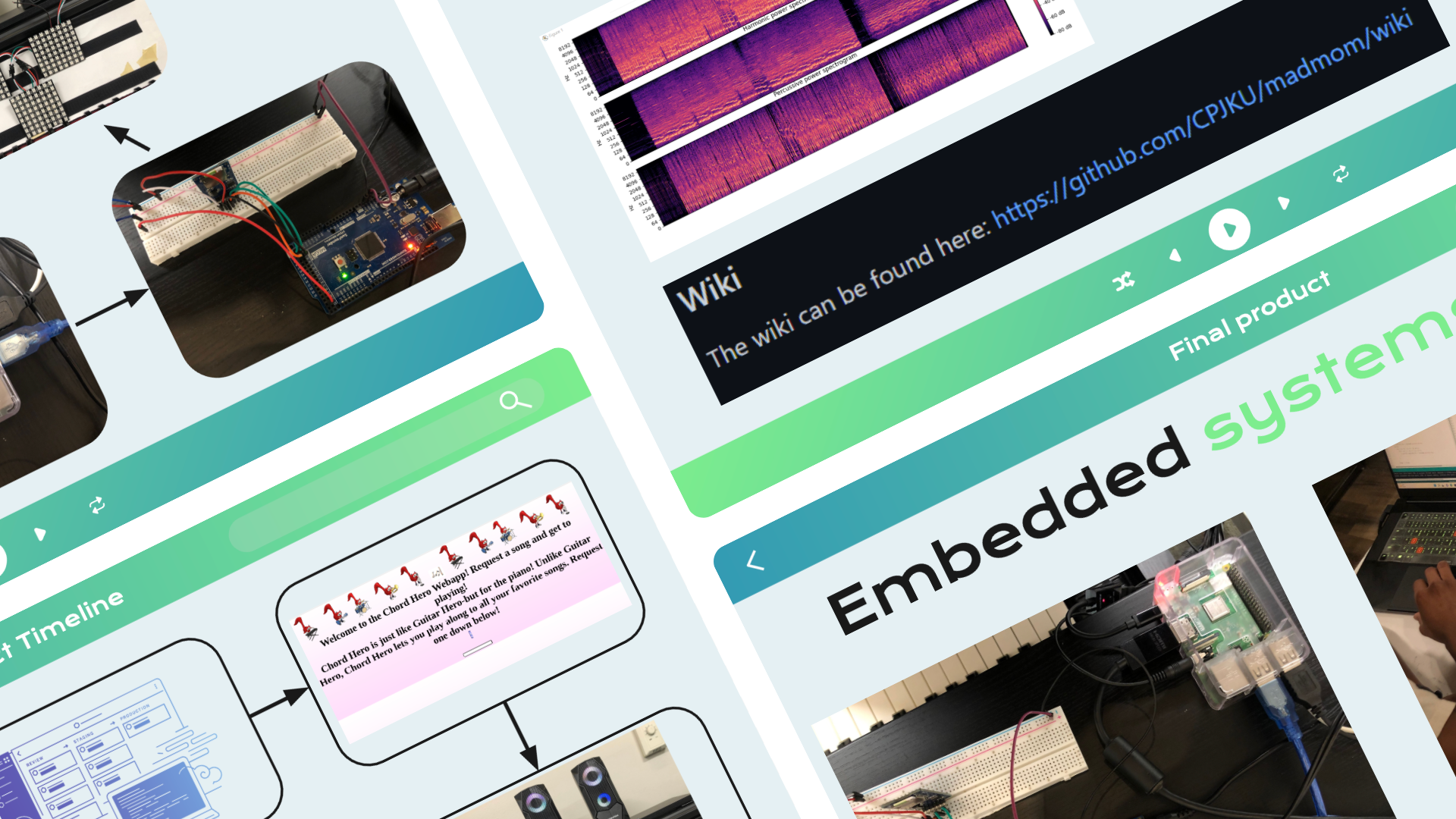
The main goal of the project was to create a product able to predict and display the chords that accompany a song. To do this, a user selects a song from YouTube and inputs the link for our software program. From there, we use signal processing techniques to find the chords and beat of the music. Once that is done, the song is played and the chords are displayed with an LED matrix in the style of “Guitar Hero,” where the user can play along to the selected song on a real keyboard.
2020-2021 projects
Pass the Butter
robotic butter-passing machine
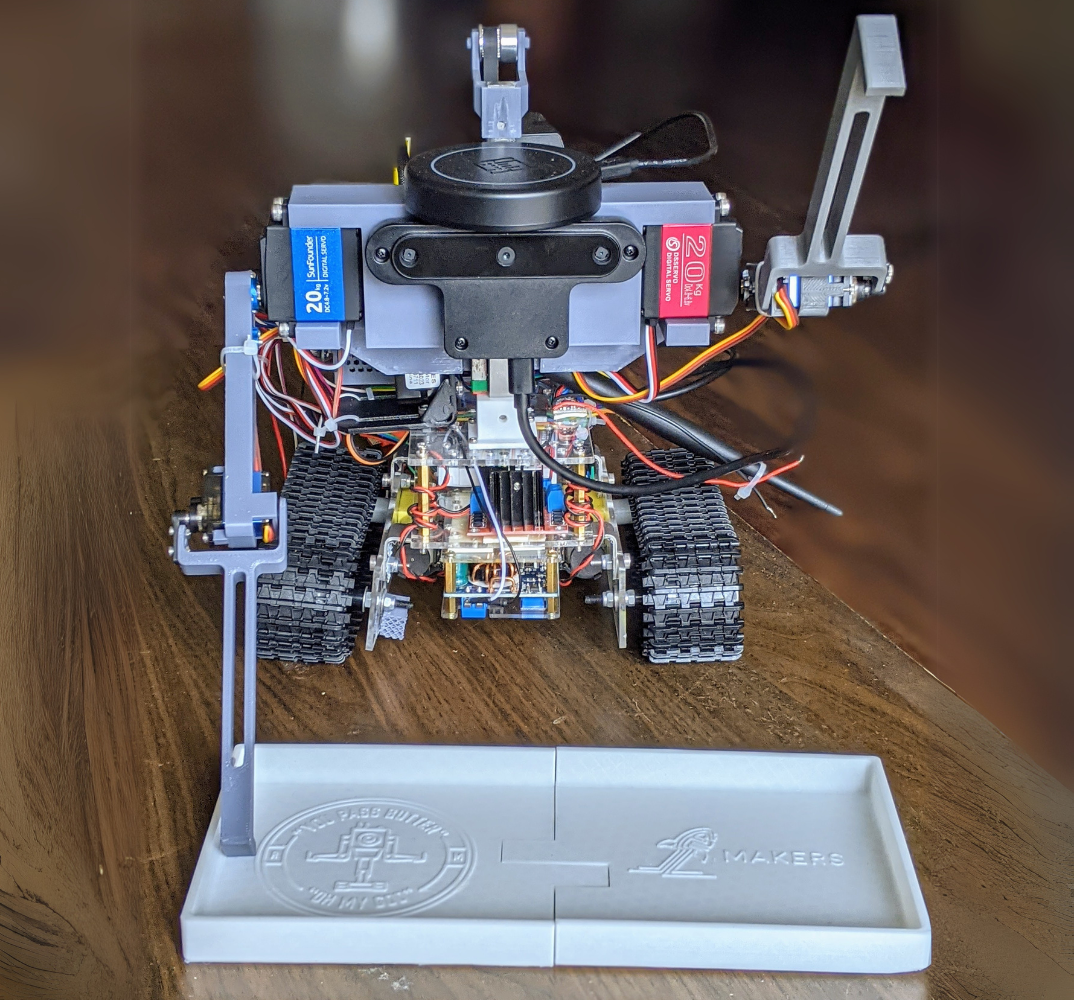
The purpose of this project is to build a robot which is capable of locating different people at a dinner table and passing butter to them when commanded. This is an idea made popular by a scene from Ricky and Morty. It combines knowledge of mechanical, electrical, software, and robot design.
Smart Glasses
AI-powered smart glasses
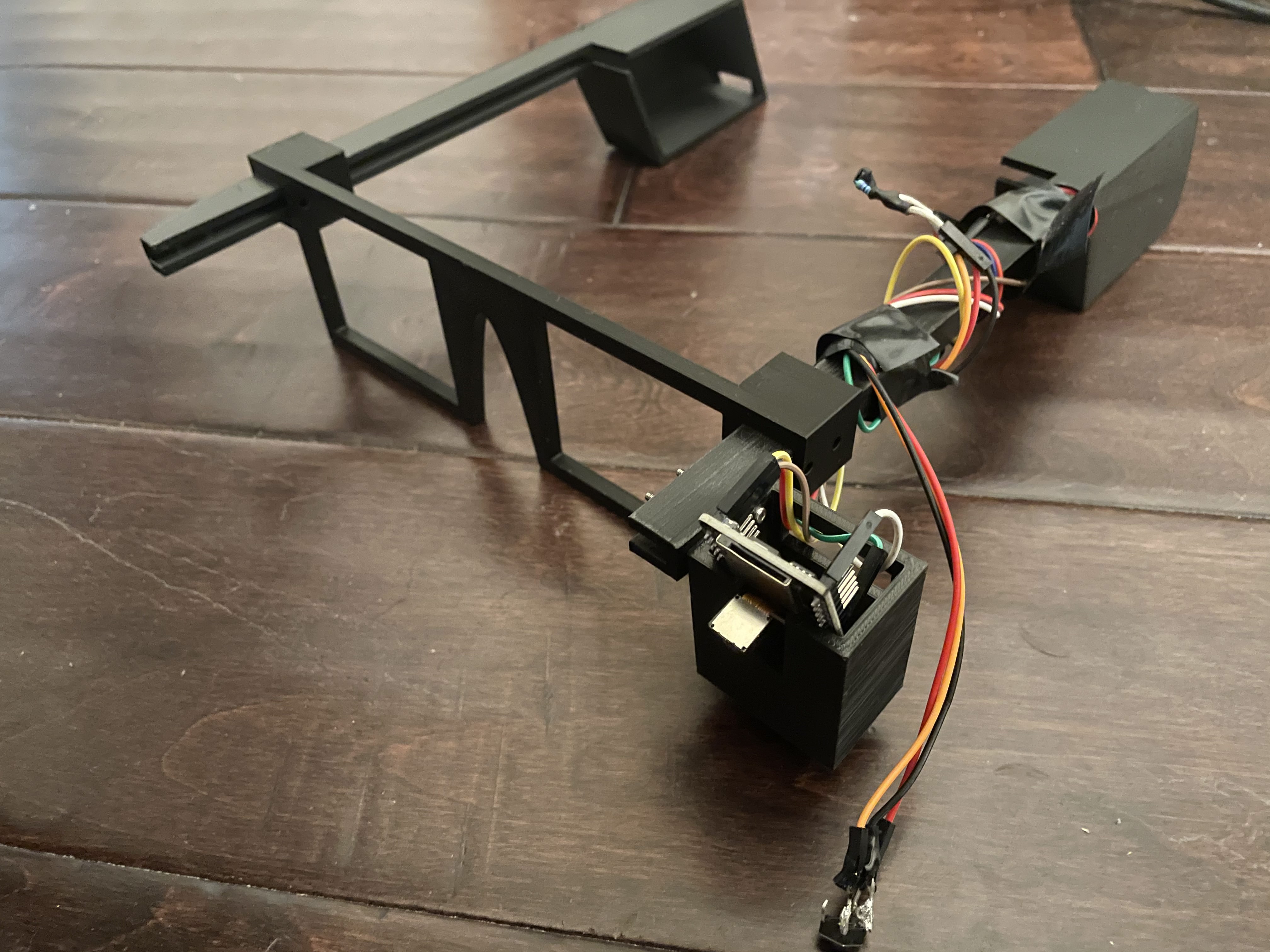
Smart Glasses are a pair of glasses that can do smart things, including voice recognition, image recognition, and text to speech. The system includes an iOS app, ESP-32 CAM microcontroller, and a Node.js server. BLE connects the iOS app to the ESP-32 CAM and regular HTTPS is used to connect the app to the server. A speaker on the microcontroller streams microphone data to the app for voice recognition. Then, the recognized text is sent to the server where it is proxied to DialogFlow to handle bot responses. The bot response is parsed by the app which commands the ESP-32 to take a picture or turn on a light
Robo Dog
robotic dog companion
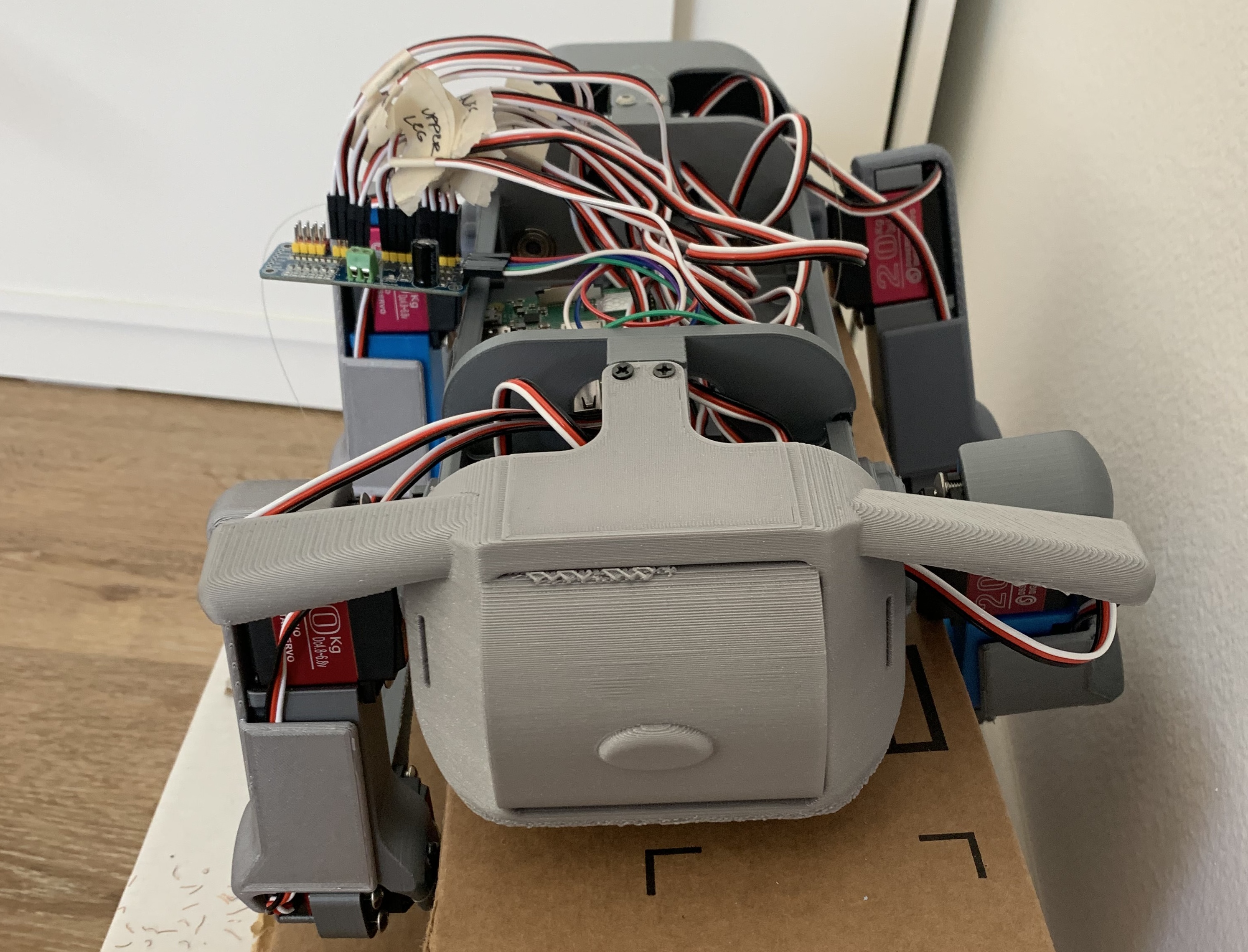
Based on the Boston Dynamics dog, RoboDog took the SpotMicro Dog and wanted to make this dog more aesthetic friendly. The goal of the project was to show that Robotic animals can be aesthetically pleasing as well as cool. This was done by attempting to attach a tail and fixing the head of the dog. One of the biggest parts of this project was learning how to use the Robot Operating System and it also required a lot of CAD knowledge. This project is purely mechanical, and took a lot of time to do because we were still learning how to 3D print things. This will not be the last time this dog will be seen as the goal is to still have it more functional, during the time of showcase one of the big issues was learning how servos worked. As it turned out the servos were not calibrated properly so the goal is to fix the calibrations so we can have a walking dog.
Project Zoomba
long-distance telepresence robot

Zoomba is a telepresence robot that a user anywhere in the world can operate over the Internet. The user can drive Zoomba as well as see, hear, be seen, and be heard by people on the robot's side.
teenage Jeanette makes a garden.
outdoor, interactive deep water culture hydroponic system

teenage Jeanette makes a garden. is an outdoor, interactive deep water culture (DWC) hydroponics system that plays synthesizer sounds and lights up depending on any one person's proximity to it. This project was installed in the parking lot of the USC Graduate Fine Arts Building (IFT) on Flower St. and is planned to be reinstalled in the E-Quad of the USC Viterbi School of Engineering. teen Jean was inspired by artists Félix Gonzáles-Torres, Andy Goldsworthy, Olafur Eliasson, Noah Purifoy, and the music of Emily A. Sprague. It was made to commemorate the lives lost due to the pandemic and to showcase human resilience and the experience of loss and love that ultimately connects us to something higher than ourselves.
Dude Where's My Bike
LTE IoT bike security system

Dude Where's My Bike is an LTE IoT security system aimed to prevent bike theft on campus. It has motion sensors and a gps module so the bikes position will always be known by the user via a mobile app. The backend uses a http/mqtt bridge which enables smooth and streamlined communication between the microcontroller on the bike and the native mobile app on the phone. With Dude Where's My Bike your bike is always safe!
Portal Gun Portal Fun
Rick and Morty-inspired portal gun

Portal gun’s goal was to create a replica of the portal gun pictured in Rick and Morty. The user enters a location on an intuitive dial UI and then presses the trigger button. The raspberry pi inside then makes a request for google earth images of that location and stitches them together. Finally, it projects the final picture with the addition of a spinning portal behind it through an hdmi connection to the mini projector inside. This involved use of the google earth api, image stitching, opencv, soldering components together, and designing and 3d printing a shell.
Wizard's Chess
Harry Potter-inspired chess set

The goal of our project was to create a real-life version of Wizard's Chess from Harry Potter, in which chess pieces move autonomously across a board as dictated by player voice commands. Players make moves by interacting with a web application built with React that contains voice recognition logic and a basic UI displaying the game board. These moves are then sent through HTTP requests to a Python Flask server running on a Raspberry Pi, which processes the moves and controls the stepper motors and electromagnets that carry the pieces across the physical board. Each chess piece contains a magnet sitting at its bottom that is attracted by the electromagnet moving under the board. The pieces also break open when captured, achieved by reversing the polarity of the electromagnet to flip the magnet within the piece above and trigger the sides of the price to fall open. This mechanism was created by 3D printing each piece to have 2 mirrored sides held together by hinges.
Heat Press
airbag heat press for custom t-shirts

Team Heat Press created a fully functional airbag heat press to print custom t-shirts. The electrical team focused on a bluetooth controlled heating pad, and the mechanical team created the heat press frame and airbag. The team had so much fun learning how to use power tools together!
Dealer No Deal
BlackJack card dealign robot
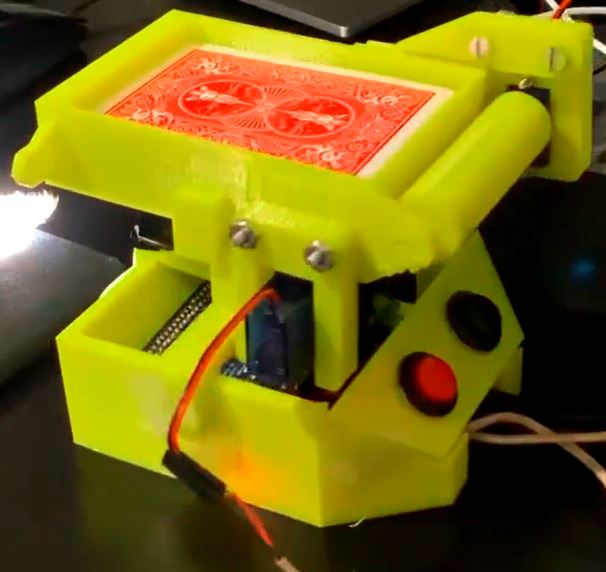
Dealer No Deal is a BlackJack card dealing robot that makes the game a little more interesting if you know what you're looking for. By knowing the secret code of button inputs, the hidden camera in the robot looks at the next card about to be played and lets the player know whether they should Hit or Stand. The goal of this project is to help me make some money by scamming the rest of Makers :P and never lose at BlackJack. The robot is made of custom 3d printed parts and a dual-roller system to ensure that cards are accurately dealt. The software uses a python script for the BlackJack game logic as well as OpenCV on a pi camera for the card vision system.
Mask Off
anti-masker security system
MASK OFF is a smart mask detecting system that keeps the anti-maskers away! Our device uses computer vision to detect a mask on someone's face, and consequently unlocks or locks the door to your establishment. It works on everyone, from your neighborhood Karens to your neighborhood dogs. MASK OFF implements a face mask detection model that prevents non-maskers from entering a unit. All a user has to do is press a button, and based on whether our camera detects a mask or not, a signal is sent to a raspberry pi that unlocks a door. We initially implemented an open source neural network model using Keras and Tensorflow. Then, we integrated the model with the raspberry pi in order to have a button set off the unlocking signal.
Space Painter
CNC light painting robot

SpacePainter is a multi-axis CNC light painting robot. Essentially, it is a robotic arm that moves an LED in programmed patterns. When photographed by a long-exposure camera, the robot's path gets traced out in space by the light. It can be used to create cool effects in photos or as a multimedia installation piece. It is built with custom 3D printed parts and is controlled by an Arduino microcontroller. It uses two stepper motors to move and an Adafruit Neopixel as an LED. Over the course of this semester, we have designed, built, and programmed the entire robot from scratch. The robot can paint five different light paintings and we are working on adding more!
Smart Lock
IoT-based door lock system

Smart Lock is an IoT lock that can be controlled from your phone. Our front end is connected to a server that communicates with an Arduino. When the Arduino receives a message, it opens or closes the lock depending on the message received. We designed a custom lock using CAD that can be attached to a deadbolt, and programmed the embedded system code as well as the communications and backend of the project.
Smart Tic Tac Toe
voice-controlled tic-tac-toe robot
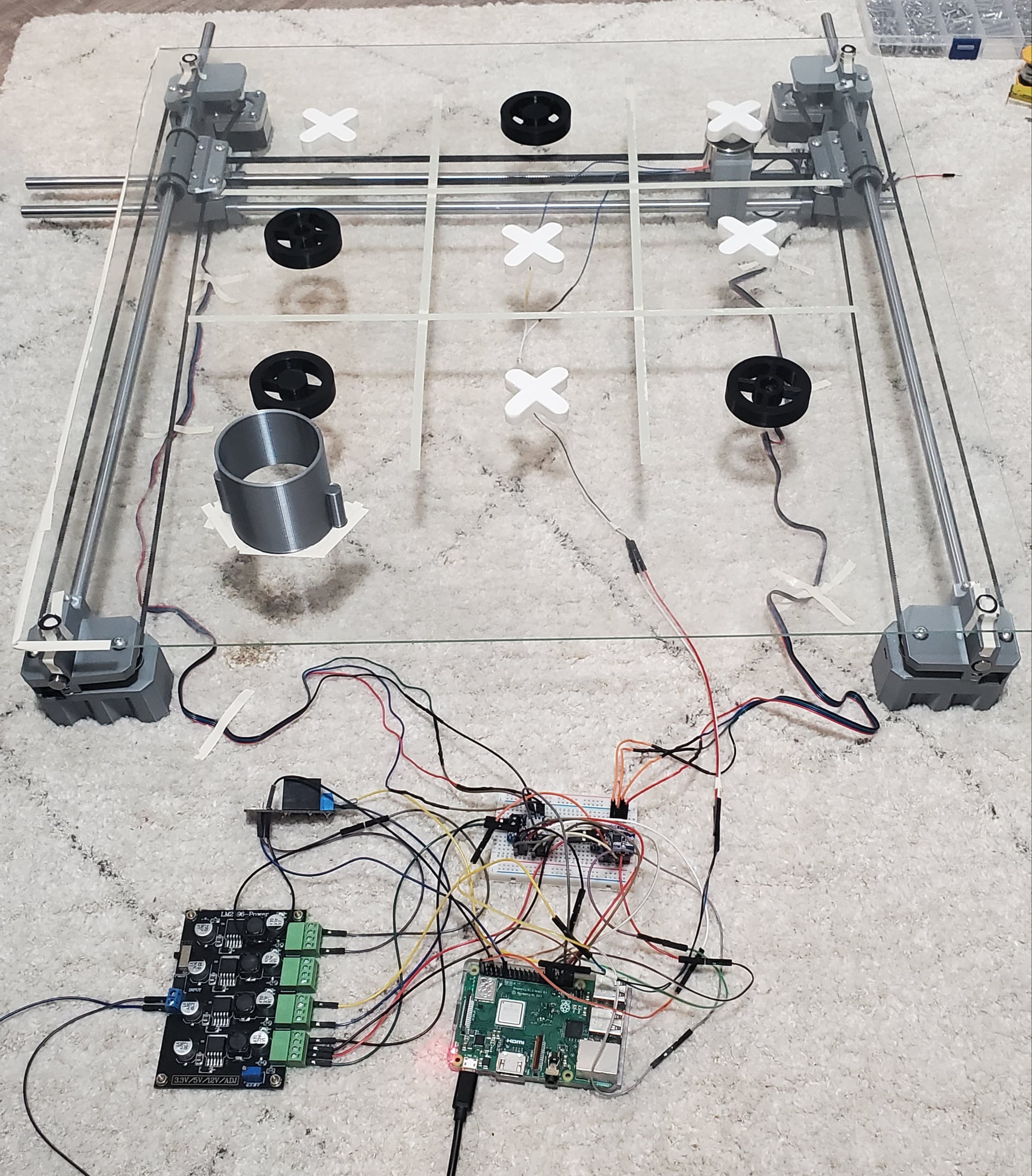
The goal of our project was to make a tic-tac-toe board that plays the game for you! You can make moves using voice commands, and X and O pieces will move across the board to the correct locations on the grid. You can also either play against a friend, or against an AI at three different difficulty levels. To implement speech recognition, we used a React web app and React API that listens to your voice through any laptop microphone. The moves you make are then sent back to our Python back-end which utilizes the Flask web framework. Here, our AI algorithm determines what moves to make in response, and our motor control code moves stepper motors to place pieces on the physical grid. The board itself is a 2 axis motor stage with linear slides, pulleys, and 3D-printed mounts. An electromagnet that is moved around by the motors turns on and off to pull magnetic pieces across the top of the board.
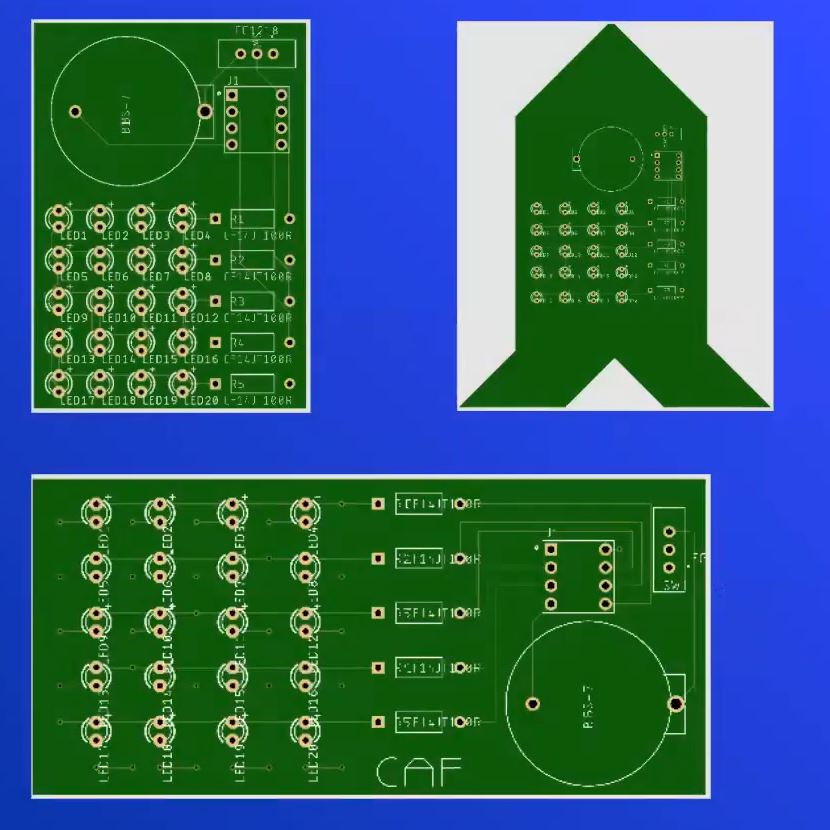
Synth
DIY synthesizer
Synth is a DIY synthesizer that uses a Raspberry Pi to generate sound and a custom PCB to control the synthesizer. The synthesizer has a keyboard with 13 keys that can be used to play different notes. The goal of this project is to create a fun and easy-to-use synthesizer that can be used by anyone to create music.
Arduino Sonar
autonomous submarine
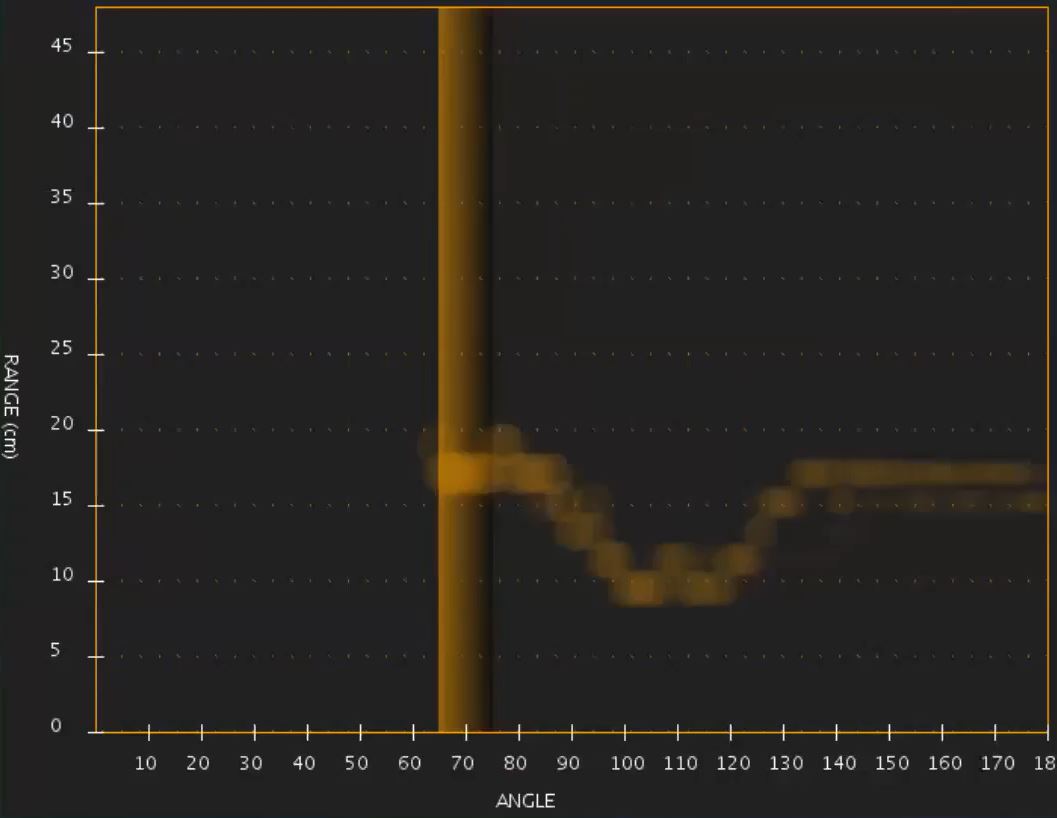
Sonar is an autonomous submarine that uses a Raspberry Pi to control the motors and sensors. The submarine has a camera that is used to detect objects in the water and a sonar sensor that is used to measure the distance to objects. The goal of this project is to create a fun and easy-to-use submarine that can be used to explore underwater environments.
Covid Simulation
python programming guided build
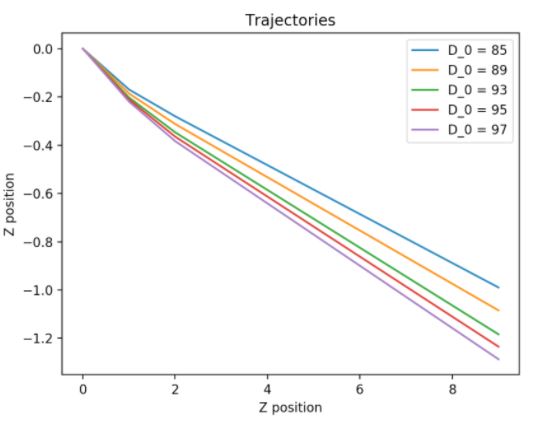
Covid Simulation is a guided build that aims to simulate the spread of covid using a Respiratory Exchange Model. Using math and physics models, we generated equations of trajectories of particles and later, total exposure to airborne covid particles. We used a lot of python programming, including libraries such as matplotlib and numpy, and also gained an understanding of the physical phenomena that are at play when quantifying the spread of a particle through the air. This guided build had an emphasis on Python programming skills and was headed by Radhika Bhuckory.
CAD-APULT
CAD guided build
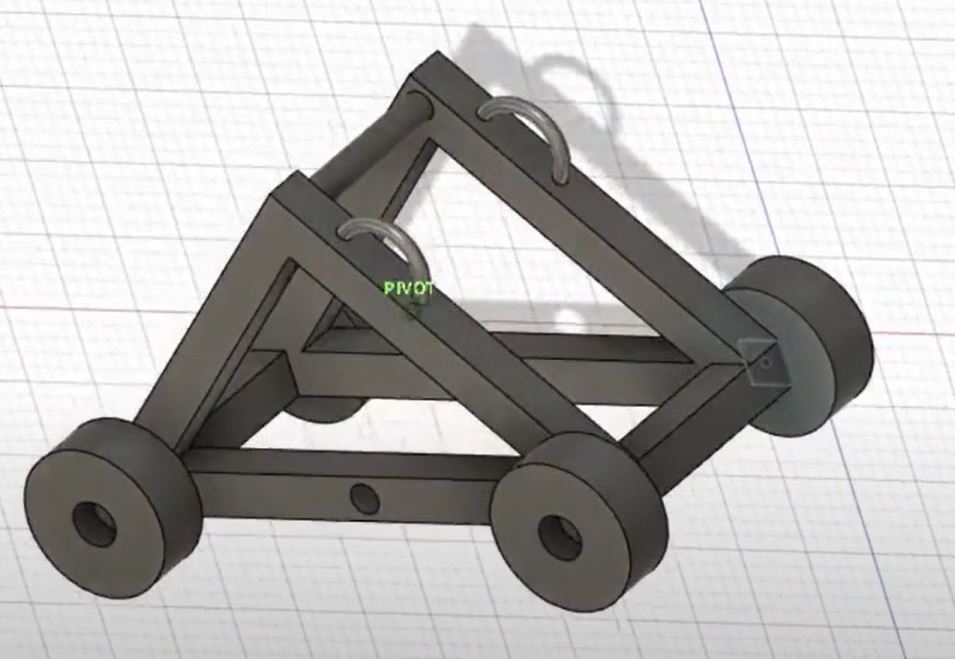
This guided build used Autodesk Fusion 360 CAD software to design a custom catapult. We created complex geometric shapes to form the different parts of the catapult, including the base, the arches, and the arm. We placed an emphasis on 3D design skills and 3D printing to give students a good understanding of how to plan, design, and implement CAD models. Headed by Ashwan Kadam.
IOT TI84
IOT guided build
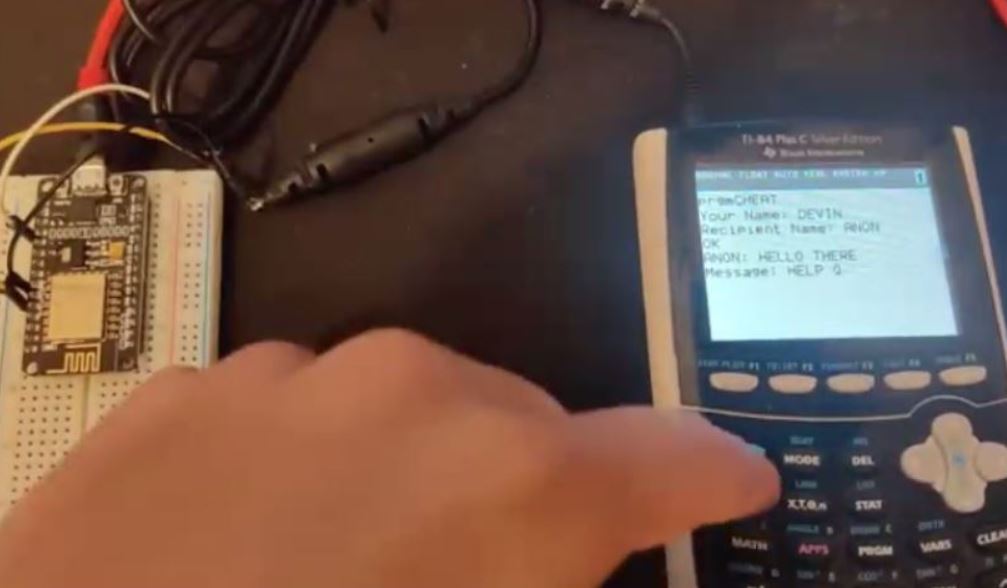
In this very applicable guided build project, we learned how to hack a TI84 graphing calculator so it has internet communciation capabilities. There was an emphasis on Arduino programming skills (specifically, using an ESP8266) and learning how to navigate the treacherous landscape of TI Basic coding. The PM for IOT TI84 was Devin Mui.
Get On My Bevel
CAD guided build
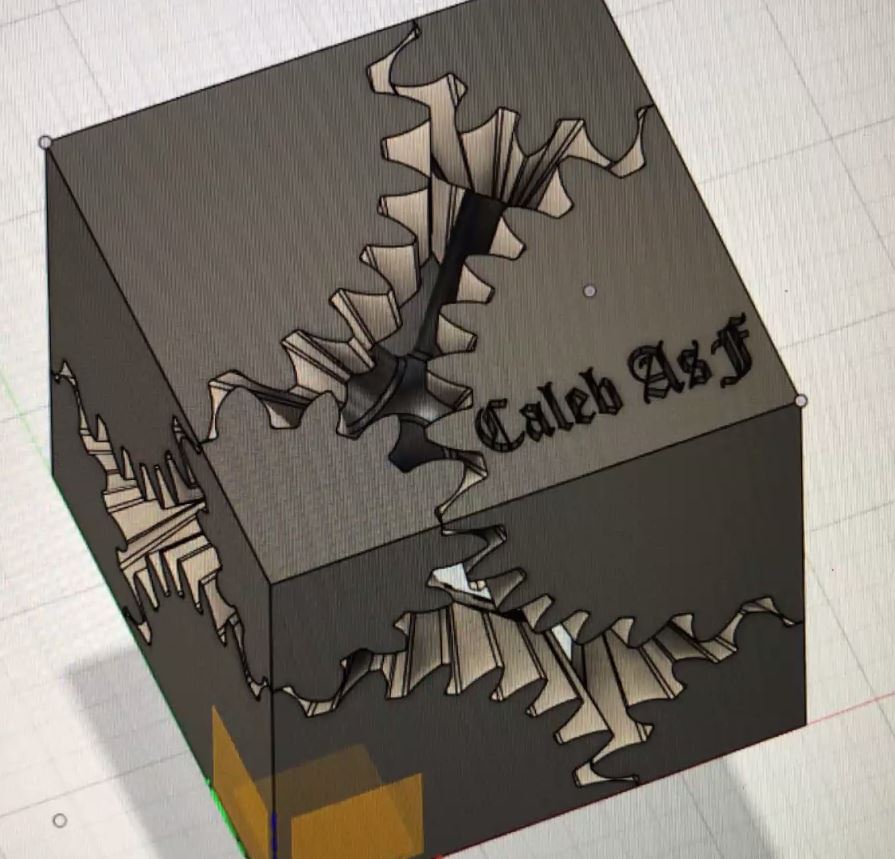
The goal of this project is to use bevel gears to create a cool polygonal shape. When you rotate one gear, it distorts the shape, but as you continue to rotate it gradually returns to its original form. This GB not only taught members to CAD model individual parts, but also connect them to form a functioning composite design. As an added bonus, members created their own custom Adobe Illustrator designs and imported them onto their CAD models! Led by PM Ashwan Kadam.
PCB Design
PCB guided build
As it name may suggest, this GB taught users how create PCB schematics, and then place them onto the board using PCB design software. In doing this, members not only learned how to use Autodesk Eagle PCB design software, but also how to program their LED matrix microcontroller with an Arduino and solder parts onto their PCB board. PMed by Efaz Muhaimen.
2019-2020 projects
Makers ARMy
wearable sleeve-controlled robotic arm

We are building a robotic arm that is controlled by a sleeve that is linked to the arm through Bluetooth. The robot then uses information from the sleeve to mimic the user's motions. To build this project, we used CAD skills to model the arm, electrical engineering skills to wire the robots, and embedded programming & robotics skills to get the arm and sensors working.
Forget Me Not
valuable item reminder device

Forget Me Not is a project geared to making sure you never forget your valuables at home ever again. Our project involves a central Arduino that is located in your home. It uses Bluetooth Low Energy to communicate with peripheral devices located on your wallet, keys and any other essentials you don't want to leave behind. If the system detects you leaving the house without any of these, it will buzz, reminding you that you left something behind.
Robonaldo
robotic soccer player
Robonaldo is a robot that is designed to autonomously drive while avoid obstacles, track a soccer ball, and shoot on a goal. Our project uses Robot Operating System (ROS), and an Nvidia Jetson as the brains of the robot. In the future we are planning to use reinforcement learning to teach the bot to drive, and install an appendage that allows Robonaldo to pull in and shoot a soccer ball. Other aspects of engineering that have been used in Robonaldo include computer vision, Arduino programming, Gazebo simulations, and CAD design.
Apollo
multi-sound profile guitar
The goal of our project is to create a guitar that can emulate the sounds of other instruments when it is strummed. Our project consists of four phases: CAD, Manufacturing, Electrical Design, and Programming. The technical skills we needed included CAD software proficiency, electrical/wiring experience, programming experience for arduino, MIDI knowledge, and manufacturing skills.
DJ Roomba
autonomous DJ robot
The goal of our project was to build a robot from scratch and then add the functionality to follow people around and play music. It consisted of three main parts: (1) Physically putting together and wiring the robot, (2) Developing the software so that it could follow a single person, and (3) Adding in the 'extras' like playing music from a bluetooth speaker and designing an enclosure for the robot. DJ Roomba required a variety of technical skills, covering a lot from both hardware and software. Our work mainly fit into either embedded development, computer vision, or the general, overarching category of robotics.
Smart Pen
smart pen for digitizing handwriting
We wanted to develop a pen that would turn hand written text into a digital document. We believe that this could help both in classes that do not allow laptops and for people who prefer to take notes by hand. We wanted to create a machine learning algorithm to be able to recognize what is being written and later upload it to a computer to be digitized.
Flip Off
Flip-Disc display

The goal of this project is to make our own Flip-Disc display entirely from scratch. In order to be able to make the largest possible display with our budget, we have spent a lot of time designing a pixel that is easy to make, cheap to produce, and made with recycled materials. Once the display is built we will display it in the Ming Hsieh Institute Lounge -- we are still deciding what to show on screen.
Disaster Relief Spider
autonomous all-terrain spider robot

The goal of our project was to create an autonomous spider robot that is capable of traversing different terrains and climb over obstacles. The robot is 3d-printed and consists of 8 legs with 3 servo motors each connected to a BeagleBone Blue. The spider can be controlled either through a direct connection to the BeagleBone Blue or wirelessly with a controller. An Nvidia Jetson Nano with an attached camera adds computer vison capability allowing the robot to move autonomously. The technical skills involved in the project include coding in Python, integrating computer vision capabilities, programming a microcontroller to control motors, adding Bluetooth communication, and creating CAD models.
2018-2019 projects
Bits Please Magic Mirror
smart mirror

Our team built a 'magic mirror' which is essentially a smart mirror IoT device that is able to access a myriad of helpful information from basic things like the weather, time, and date, to reminders from Google Calendar, a Spotify player, and the top social media and news headlines. It has the unique feature of complimenting you when you get closer to it (with the help of an ultrasonic sensor). We configured the brain of the mirror (the raspberry pi) with modules from an open source framework and modified them for our mirror. We also built our frame from scratch. Our team got to explore all types of fun technologies and modules through building this mirror, and had the best time putting it together!
Boba Babes
IoT boba machine

Our project was building an IoT Boba Machine which autonomously makes our favorite drink: boba tea. It brews tea in hot water and adds milk, tapioca pearls, and honey. We built and designed the physical machine from the frame and various apparatuses to brew the tea and put in the necessary ingredients to make delicious boba. We also connected the machine to a phone app where you tell it when to start and how to adjust sweetness. Overall, we're a really chill team who likes to have fun but also get work done. This project involves many different components - mobile app design, CAD, working with motors/sensors, IoT integration, working with tools (i.e. drill, band saw, hammer), and is very hands on.
HADES
wearable attention tracker

Originally inspired by the CHARIOT project headed by Professor Krishnamachari, HADES aims to create wearable attention trackers for use in the classroom. This allows a teacher to track how many of her students are actually learning the material and allows for her to adjust mid-lesson to maximize student potential. To create the wearable tracker, we used currently existing wearable technology combined with biosensors to track physical symptoms of decreased attention span, including heart rate, body temperature, and galvanic skin response. The sensors, combined with a wifi-enabled microcontroller, are packaged into one single glove, allowing for the child’s ease of wear and durability.
Micromouse
maze-traversing robot

Micromouse is an existing international competition in which teams build robots that can autonomously navigate mazes and find the fastest path through said maze. Our project was to build a robot capable of performing in a Micromouse event, and then improve that as time goes on to make ourselves more competitive and well-known within the scene. Alongside this, we built a simulator for different maze discovering and solving algorithms, which we used to test our algorithms while our robot was being built.
Robosketch
robotic drawing arm
Robosketch is a drawing robot that uses pens to draw on 8.5x11 paper. It can draw arbitrary shapes and scaled vector graphics.
Smart Rebounder
basketball training module
The Smart Rebounder is a basketball hoop attachment aimed at improving athlete shot training. It attaches to the rim of the basket and acts as a slide to funnel make baskets back to the shooter. It uses OpenCV and servo motors to track the shooter’s position and rotate the attachment to point in the direction of the athlete in order to funnel their made baskets back in their direction.
Stratos Speaker System
modular speaker system

The goal of this project was to build a professional-grade home speaker system that leverages IoT technologies to provide audio to different areas of the house. For our project we have built a unit that will receive music streams from multiple devices and output them to the appropriate series of speakers.
There-Friends
EM-reliant musical instrument

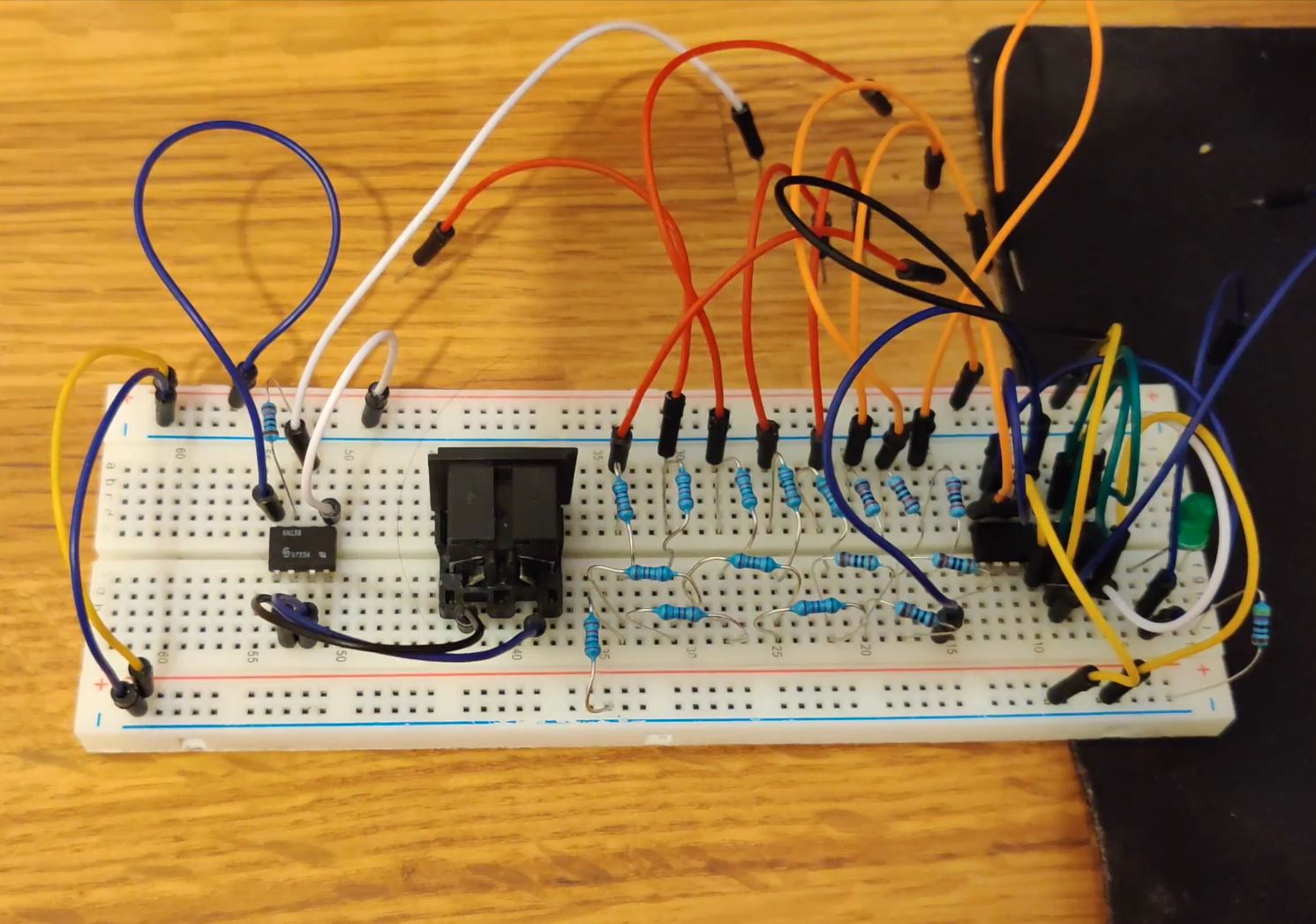
We have constructed a musical instrument that relies solely on analog electronics and an interesting EM phenomenon. We've breadboarded a circuit based on a guide we found online, and have put it on a Printed Circuit Board (PCB).